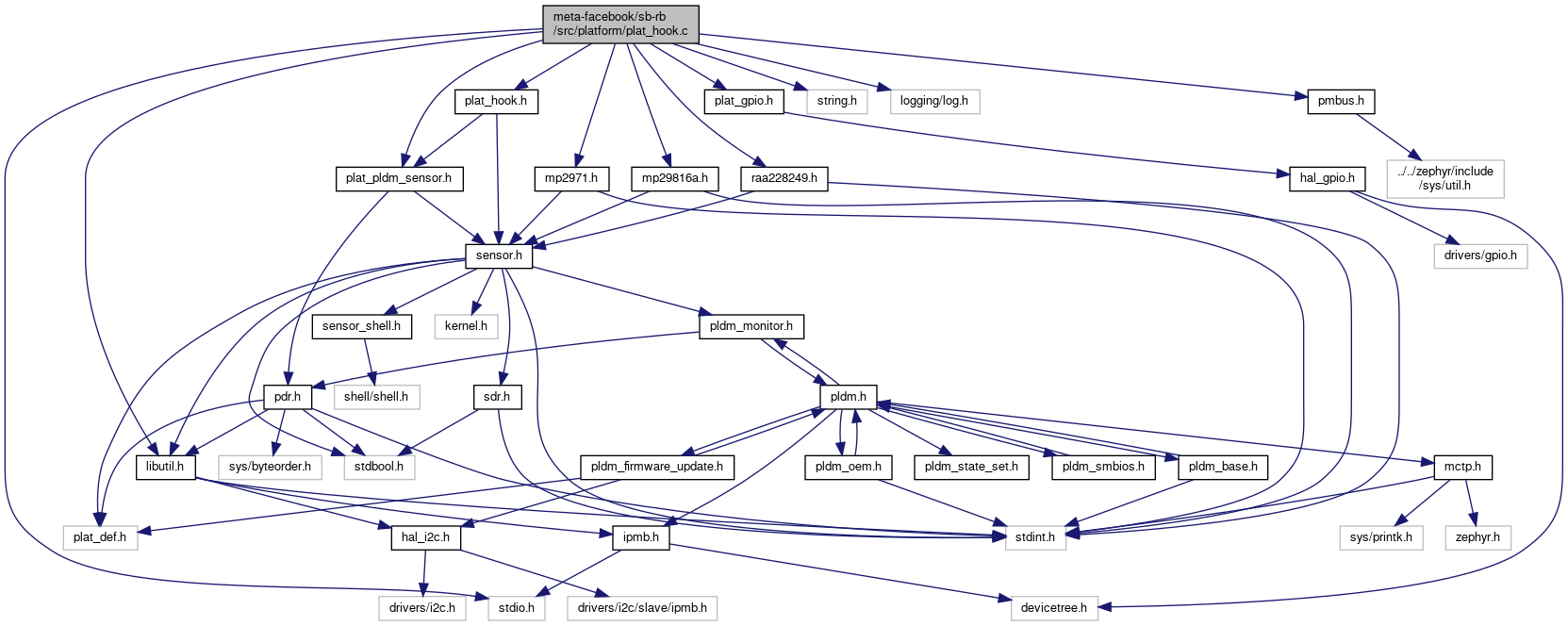
#include <stdio.h>#include <string.h>#include "libutil.h"#include <logging/log.h>#include "plat_hook.h"#include "pmbus.h"#include "plat_gpio.h"#include "plat_pldm_sensor.h"#include "mp2971.h"#include "mp29816a.h"#include "raa228249.h"#include "plat_user_setting.h"#include "plat_fru.h"#include "plat_class.h"#include "plat_i2c_target.h"#include "shell_plat_average_power.h"#include "plat_ioexp.h"#include "tmp431.h"#include "emc1413.h"#include "plat_util.h"
Include dependency graph for plat_hook.c:
Macros | |
| #define | EEPROM_MAX_WRITE_TIME 5 |
Functions | |
| LOG_MODULE_REGISTER (plat_hook) | |
| bool | post_sensor_reading_hook_func (uint8_t sensor_number) |
| void * | vr_mutex_get (enum VR_INDEX_E vr_index) |
| bool | pre_vr_read (sensor_cfg *cfg, void *args) |
| bool | post_common_sensor_read (sensor_cfg *cfg, void *args, int *const reading) |
| bool | emc1413_check_open_status (sensor_cfg *cfg, uint8_t status) |
| bool | post_tmp432_read (sensor_cfg *cfg, void *args, int *reading) |
| bool | is_mb_dc_on () |
| void | vr_mutex_init (void) |
| void | set_bootstrap_table_change_setting_value (uint8_t index, uint8_t value) |
| bool | vr_rail_name_get (uint8_t rail, uint8_t **name) |
| bool | vr_status_name_get (uint8_t rail, uint8_t **name) |
| bool | vr_rail_enum_get (uint8_t *name, uint8_t *num) |
| bool | vr_status_enum_get (uint8_t *name, uint8_t *num) |
| bool | plat_get_vr_status (uint8_t rail, uint8_t vr_status_rail, uint16_t *vr_status) |
| bool | plat_clear_vr_status (uint8_t rail) |
| bool | plat_get_vout_command (uint8_t rail, uint16_t *millivolt) |
| bool | plat_set_vout_command (uint8_t rail, uint16_t *millivolt, bool is_perm) |
| bool | vr_rail_voltage_peak_get (uint8_t *name, int *peak_value) |
| bool | vr_rail_voltage_peak_clear (uint8_t rail_index) |
| bool | plat_set_vout_range_min (uint8_t rail, uint16_t *millivolt) |
| bool | plat_set_vout_range_max (uint8_t rail, uint16_t *millivolt) |
| bool | plat_get_vout_range (uint8_t rail, uint16_t *vout_max_millivolt, uint16_t *vout_min_millivolt) |
| bool | vr_vout_range_user_settings_init (void) |
| bool | temp_threshold_user_settings_get (void *temp_threshold_user_settings) |
| bool | set_bootstrap_table_val_to_ioexp (void) |
| bool | set_ioexp_val_to_bootstrap_table (void) |
| void | add_error_bootstrap_index_to_list (uint8_t index) |
| bool | bootstrap_default_settings_init (void) |
| bool | bootstrap_user_settings_get (void *bootstrap_user_settings) |
| bool | bootstrap_user_settings_set (void *bootstrap_user_settings) |
| bool | check_is_bootstrap_setting_value_valid (uint8_t rail, uint8_t value) |
| bool | find_bootstrap_by_rail (uint8_t rail, bootstrap_mapping_register *result) |
| bool | get_bootstrap_change_drive_level (int rail, int *drive_level) |
| bool | strap_enum_get (uint8_t *name, uint8_t *num) |
| bool | set_bootstrap_table_and_user_settings (uint8_t rail, uint8_t *change_setting_value, uint8_t drive_index_level, bool is_perm, bool is_default) |
| bool | set_bootstrap_val_to_device (uint8_t strap, uint8_t val) |
| bool | bootstrap_user_settings_init (void) |
| bool | strap_name_get (uint8_t rail, uint8_t **name) |
| void | plat_pldm_sensor_post_load_init (int thread_id) |
| bool | voltage_command_setting_get (uint8_t rail, uint16_t *vout) |
| uint8_t | get_strap_index_max () |
| bool | plat_set_vr_reg (uint8_t rail, uint8_t reg, uint8_t *data, uint8_t len) |
| int | get_vr_page (uint8_t rail) |
| int | set_vr_mp29816a_reg (uint8_t rail, uint16_t *set_value, uint8_t set_reg) |
| int | get_vr_mp29816a_reg (uint8_t rail, uint16_t *get_data, uint8_t get_reg) |
| int | get_vr_mp2971_reg (uint8_t rail, uint16_t *get_data, uint8_t get_reg) |
| int | set_vr_mp2971_reg (uint8_t rail, uint16_t *set_data, uint8_t set_reg) |
| void | set_delta_ubc_time_of_vout_rise () |
| uint8_t | get_emc1413_cache_status (uint8_t idx) |
| bool | get_pre_read_bootstrap_setting_value () |
| uint8_t | get_error_bootstrap_index_list (uint8_t index) |
Variables | |
| vr_pre_proc_arg | vr_pre_read_args [] |
| mp2971_init_arg | mp2971_init_args [] |
| mpc12109_init_arg | mpc12109_init_args [] |
| uint8_t | emc1413_cache_status_0 = 0 |
| uint8_t | emc1413_cache_status_1 = 0 |
| uint8_t | emc1413_cache_status_2 = 0 |
| uint8_t | emc1413_cache_status_3 = 0 |
| vr_mapping_sensor | vr_rail_table [] |
| vr_mapping_status | vr_status_table [] |
| bootstrap_mapping_register | bootstrap_table [] |
| struct vr_vout_user_settings | voltage_command_get = { 0 } |
| vr_vout_range_user_settings_struct | vout_range_user_settings = { 0 } |
| bool | pre_read_bootstrap_setting_value = 0 |
| uint8_t | error_bootstrap_setting_value_index [8] |
| bootstrap_user_settings_struct | bootstrap_user_settings = { 0 } |
Macro Definition Documentation
◆ EEPROM_MAX_WRITE_TIME
| #define EEPROM_MAX_WRITE_TIME 5 |
Function Documentation
◆ add_error_bootstrap_index_to_list()
| void add_error_bootstrap_index_to_list | ( | uint8_t | index | ) |
◆ bootstrap_default_settings_init()
| bool bootstrap_default_settings_init | ( | void | ) |
◆ bootstrap_user_settings_get()
| bool bootstrap_user_settings_get | ( | void * | bootstrap_user_settings | ) |
Here is the call graph for this function:

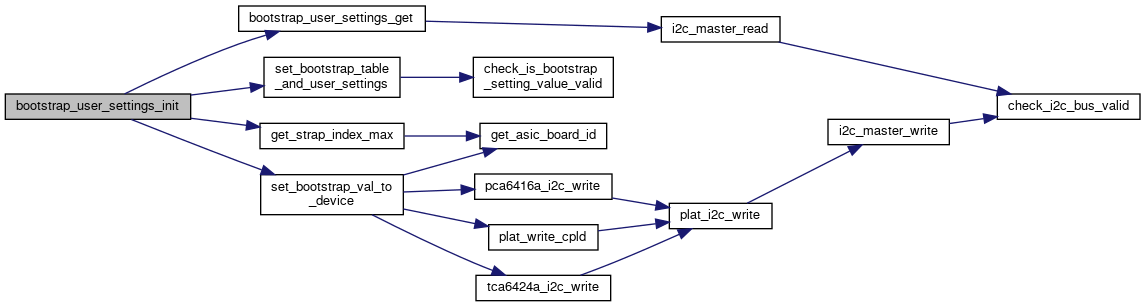
◆ bootstrap_user_settings_init()
| bool bootstrap_user_settings_init | ( | void | ) |
Here is the call graph for this function:
◆ bootstrap_user_settings_set()
| bool bootstrap_user_settings_set | ( | void * | bootstrap_user_settings | ) |
Here is the call graph for this function:

◆ check_is_bootstrap_setting_value_valid()
| bool check_is_bootstrap_setting_value_valid | ( | uint8_t | rail, |
| uint8_t | value | ||
| ) |
◆ emc1413_check_open_status()
| bool emc1413_check_open_status | ( | sensor_cfg * | cfg, |
| uint8_t | status | ||
| ) |
◆ find_bootstrap_by_rail()
| bool find_bootstrap_by_rail | ( | uint8_t | rail, |
| bootstrap_mapping_register * | result | ||
| ) |
Here is the call graph for this function:

◆ get_bootstrap_change_drive_level()
| bool get_bootstrap_change_drive_level | ( | int | rail, |
| int * | drive_level | ||
| ) |
Here is the call graph for this function:

◆ get_emc1413_cache_status()
| uint8_t get_emc1413_cache_status | ( | uint8_t | idx | ) |
◆ get_error_bootstrap_index_list()
| uint8_t get_error_bootstrap_index_list | ( | uint8_t | index | ) |
◆ get_pre_read_bootstrap_setting_value()
| bool get_pre_read_bootstrap_setting_value | ( | ) |
◆ get_strap_index_max()
| uint8_t get_strap_index_max | ( | ) |
Here is the call graph for this function:

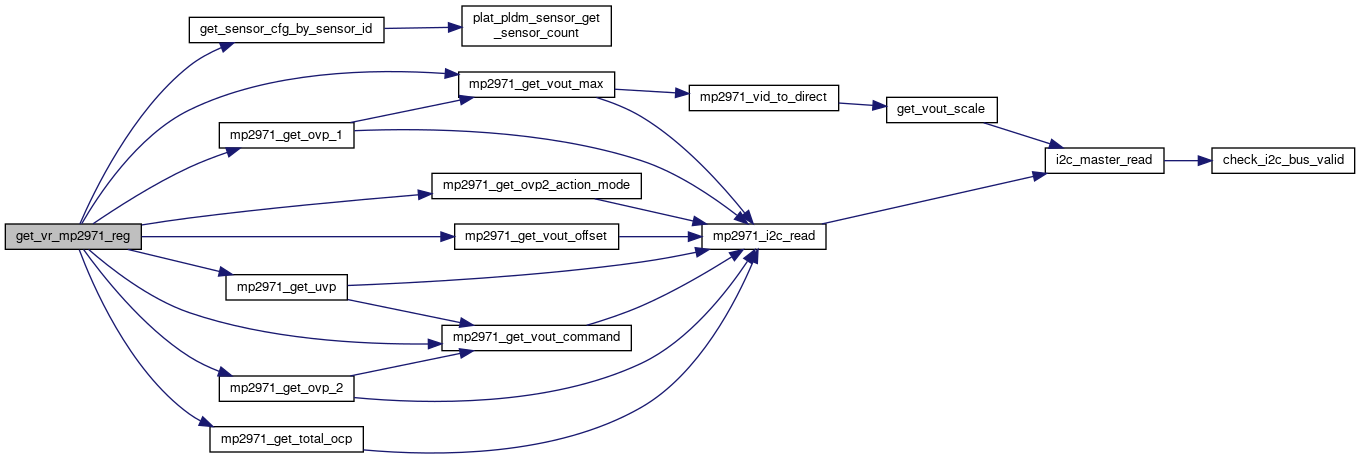
◆ get_vr_mp2971_reg()
| int get_vr_mp2971_reg | ( | uint8_t | rail, |
| uint16_t * | get_data, | ||
| uint8_t | get_reg | ||
| ) |
Here is the call graph for this function:
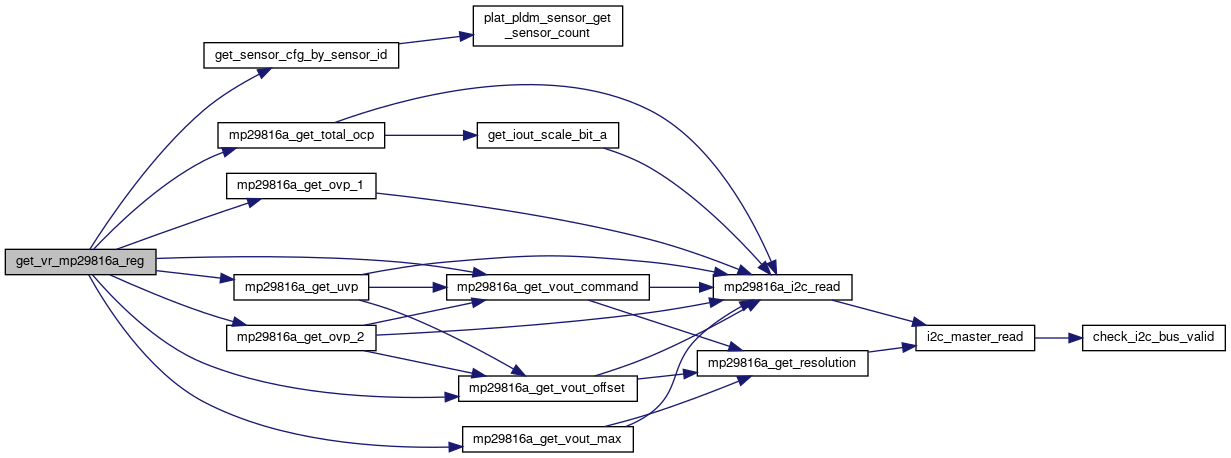
◆ get_vr_mp29816a_reg()
| int get_vr_mp29816a_reg | ( | uint8_t | rail, |
| uint16_t * | get_data, | ||
| uint8_t | get_reg | ||
| ) |
Here is the call graph for this function:
◆ get_vr_page()
| int get_vr_page | ( | uint8_t | rail | ) |
Here is the call graph for this function:

◆ is_mb_dc_on()
| bool is_mb_dc_on | ( | ) |
Here is the call graph for this function:

◆ LOG_MODULE_REGISTER()
| LOG_MODULE_REGISTER | ( | plat_hook | ) |
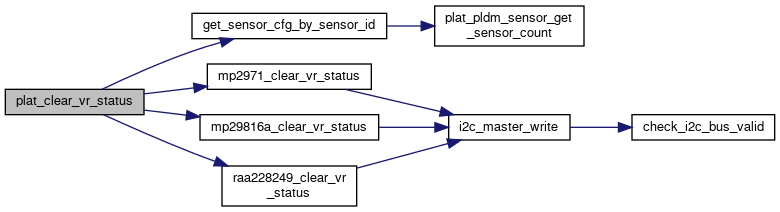
◆ plat_clear_vr_status()
| bool plat_clear_vr_status | ( | uint8_t | rail | ) |
Here is the call graph for this function:
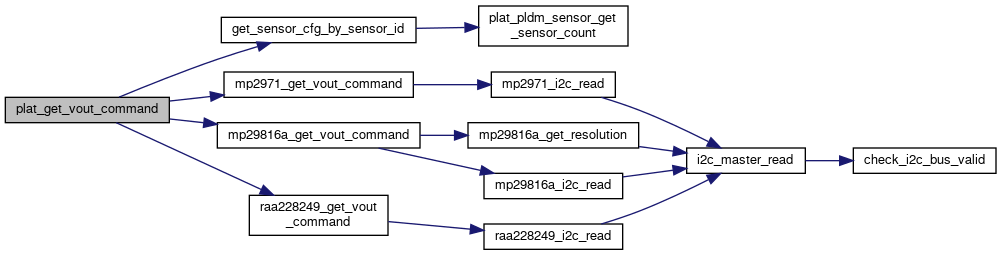
◆ plat_get_vout_command()
| bool plat_get_vout_command | ( | uint8_t | rail, |
| uint16_t * | millivolt | ||
| ) |
Here is the call graph for this function:
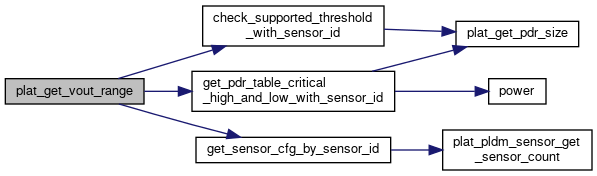
◆ plat_get_vout_range()
| bool plat_get_vout_range | ( | uint8_t | rail, |
| uint16_t * | vout_max_millivolt, | ||
| uint16_t * | vout_min_millivolt | ||
| ) |
Here is the call graph for this function:
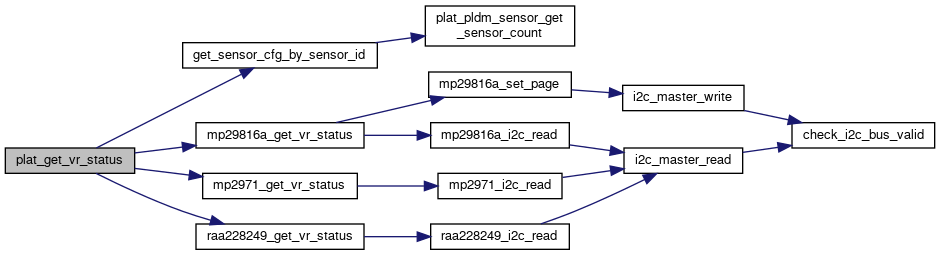
◆ plat_get_vr_status()
| bool plat_get_vr_status | ( | uint8_t | rail, |
| uint8_t | vr_status_rail, | ||
| uint16_t * | vr_status | ||
| ) |
Here is the call graph for this function:
◆ plat_pldm_sensor_post_load_init()
| void plat_pldm_sensor_post_load_init | ( | int | thread_id | ) |
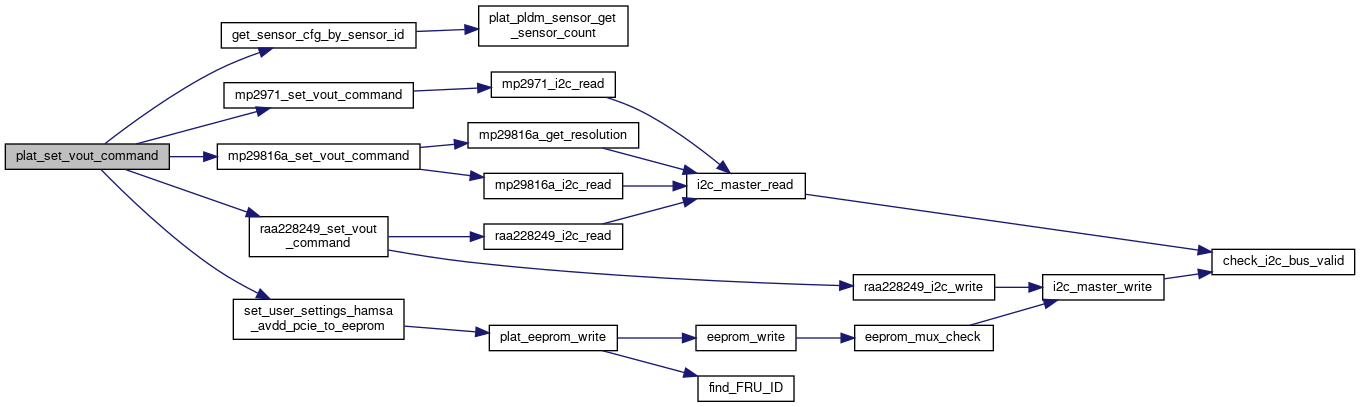
◆ plat_set_vout_command()
| bool plat_set_vout_command | ( | uint8_t | rail, |
| uint16_t * | millivolt, | ||
| bool | is_perm | ||
| ) |
Here is the call graph for this function:
◆ plat_set_vout_range_max()
| bool plat_set_vout_range_max | ( | uint8_t | rail, |
| uint16_t * | millivolt | ||
| ) |
Here is the call graph for this function:

◆ plat_set_vout_range_min()
| bool plat_set_vout_range_min | ( | uint8_t | rail, |
| uint16_t * | millivolt | ||
| ) |
Here is the call graph for this function:

◆ plat_set_vr_reg()
| bool plat_set_vr_reg | ( | uint8_t | rail, |
| uint8_t | reg, | ||
| uint8_t * | data, | ||
| uint8_t | len | ||
| ) |
Here is the call graph for this function:

◆ post_common_sensor_read()
| bool post_common_sensor_read | ( | sensor_cfg * | cfg, |
| void * | args, | ||
| int *const | reading | ||
| ) |
Here is the call graph for this function:

◆ post_sensor_reading_hook_func()
| bool post_sensor_reading_hook_func | ( | uint8_t | sensor_number | ) |
Here is the call graph for this function:

◆ post_tmp432_read()
| bool post_tmp432_read | ( | sensor_cfg * | cfg, |
| void * | args, | ||
| int * | reading | ||
| ) |
Here is the call graph for this function:

◆ pre_vr_read()
| bool pre_vr_read | ( | sensor_cfg * | cfg, |
| void * | args | ||
| ) |
Here is the call graph for this function:

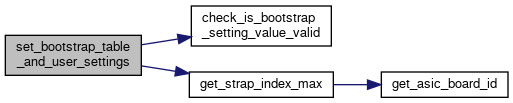
◆ set_bootstrap_table_and_user_settings()
| bool set_bootstrap_table_and_user_settings | ( | uint8_t | rail, |
| uint8_t * | change_setting_value, | ||
| uint8_t | drive_index_level, | ||
| bool | is_perm, | ||
| bool | is_default | ||
| ) |
Here is the call graph for this function:
◆ set_bootstrap_table_change_setting_value()
| void set_bootstrap_table_change_setting_value | ( | uint8_t | index, |
| uint8_t | value | ||
| ) |
◆ set_bootstrap_table_val_to_ioexp()
| bool set_bootstrap_table_val_to_ioexp | ( | void | ) |
Here is the call graph for this function:

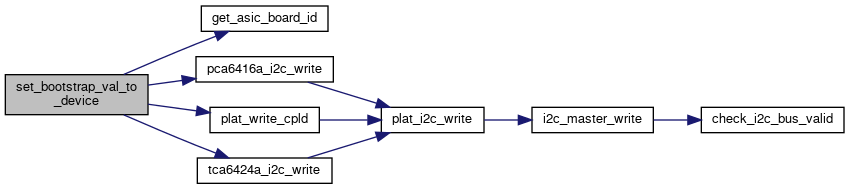
◆ set_bootstrap_val_to_device()
| bool set_bootstrap_val_to_device | ( | uint8_t | strap, |
| uint8_t | val | ||
| ) |
Here is the call graph for this function:
◆ set_delta_ubc_time_of_vout_rise()
| void set_delta_ubc_time_of_vout_rise | ( | ) |
◆ set_ioexp_val_to_bootstrap_table()
| bool set_ioexp_val_to_bootstrap_table | ( | void | ) |
Here is the call graph for this function:

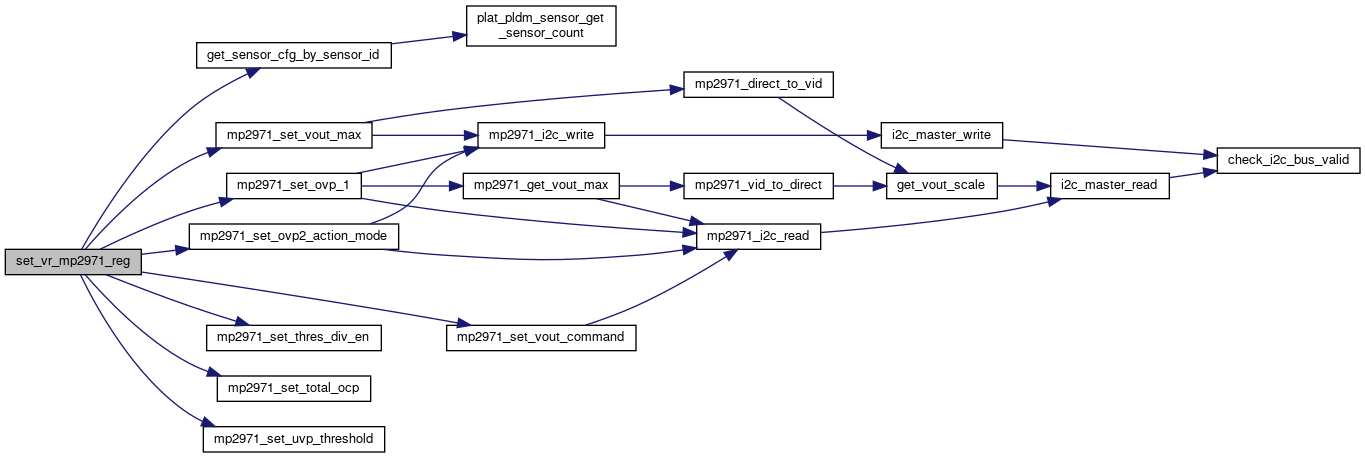
◆ set_vr_mp2971_reg()
| int set_vr_mp2971_reg | ( | uint8_t | rail, |
| uint16_t * | set_data, | ||
| uint8_t | set_reg | ||
| ) |
Here is the call graph for this function:
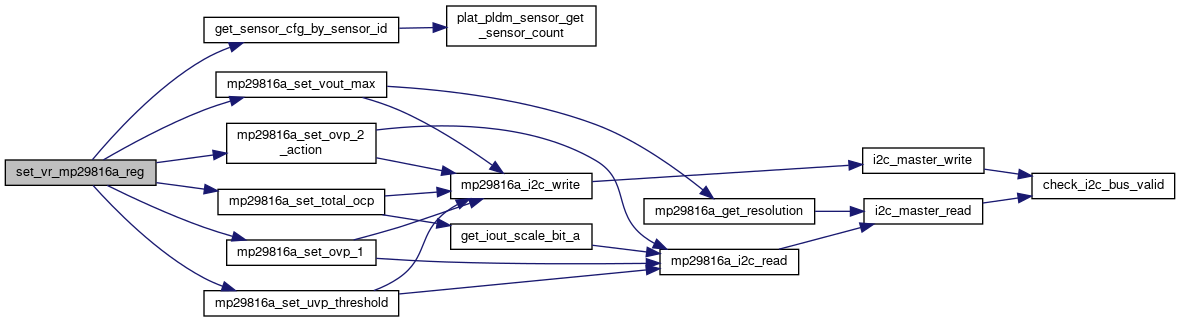
◆ set_vr_mp29816a_reg()
| int set_vr_mp29816a_reg | ( | uint8_t | rail, |
| uint16_t * | set_value, | ||
| uint8_t | set_reg | ||
| ) |
Here is the call graph for this function:
◆ strap_enum_get()
| bool strap_enum_get | ( | uint8_t * | name, |
| uint8_t * | num | ||
| ) |
Here is the call graph for this function:

◆ strap_name_get()
| bool strap_name_get | ( | uint8_t | rail, |
| uint8_t ** | name | ||
| ) |
Here is the call graph for this function:

◆ temp_threshold_user_settings_get()
| bool temp_threshold_user_settings_get | ( | void * | temp_threshold_user_settings | ) |
Here is the call graph for this function:

◆ voltage_command_setting_get()
| bool voltage_command_setting_get | ( | uint8_t | rail, |
| uint16_t * | vout | ||
| ) |
◆ vr_mutex_get()
| void * vr_mutex_get | ( | enum VR_INDEX_E | vr_index | ) |
◆ vr_mutex_init()
| void vr_mutex_init | ( | void | ) |
◆ vr_rail_enum_get()
| bool vr_rail_enum_get | ( | uint8_t * | name, |
| uint8_t * | num | ||
| ) |
◆ vr_rail_name_get()
| bool vr_rail_name_get | ( | uint8_t | rail, |
| uint8_t ** | name | ||
| ) |
◆ vr_rail_voltage_peak_clear()
| bool vr_rail_voltage_peak_clear | ( | uint8_t | rail_index | ) |
◆ vr_rail_voltage_peak_get()
| bool vr_rail_voltage_peak_get | ( | uint8_t * | name, |
| int * | peak_value | ||
| ) |
◆ vr_status_enum_get()
| bool vr_status_enum_get | ( | uint8_t * | name, |
| uint8_t * | num | ||
| ) |
◆ vr_status_name_get()
| bool vr_status_name_get | ( | uint8_t | rail, |
| uint8_t ** | name | ||
| ) |
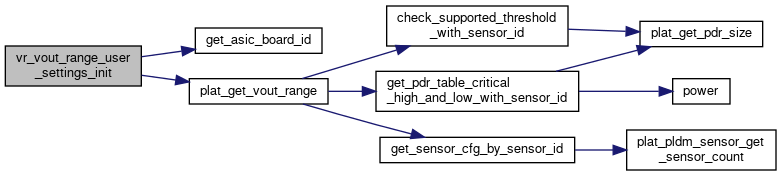
◆ vr_vout_range_user_settings_init()
| bool vr_vout_range_user_settings_init | ( | void | ) |
Here is the call graph for this function:
Variable Documentation
◆ bootstrap_table
| bootstrap_mapping_register bootstrap_table[] |
◆ bootstrap_user_settings
| bootstrap_user_settings_struct bootstrap_user_settings = { 0 } |
◆ emc1413_cache_status_0
| uint8_t emc1413_cache_status_0 = 0 |
◆ emc1413_cache_status_1
| uint8_t emc1413_cache_status_1 = 0 |
◆ emc1413_cache_status_2
| uint8_t emc1413_cache_status_2 = 0 |
◆ emc1413_cache_status_3
| uint8_t emc1413_cache_status_3 = 0 |
◆ error_bootstrap_setting_value_index
| uint8_t error_bootstrap_setting_value_index[8] |
Initial value:
◆ mp2971_init_args
Initial value:
= {
[0] = { .vout_scale_enable = true },
}
◆ mpc12109_init_args
Initial value:
= {
[0] = { .iout_lsb = 0.5, .pout_lsb = 2 },
}
◆ pre_read_bootstrap_setting_value
| bool pre_read_bootstrap_setting_value = 0 |
◆ voltage_command_get
| struct vr_vout_user_settings voltage_command_get = { 0 } |
◆ vout_range_user_settings
| vr_vout_range_user_settings_struct vout_range_user_settings = { 0 } |
◆ vr_pre_read_args
| vr_pre_proc_arg vr_pre_read_args[] |
Initial value:
= {
{ .mutex = vr_mutex + 0, .vr_page = 0x0 }, { .mutex = vr_mutex + 0, .vr_page = 0x1 },
{ .mutex = vr_mutex + 1, .vr_page = 0x0 }, { .mutex = vr_mutex + 1, .vr_page = 0x1 },
{ .mutex = vr_mutex + 2, .vr_page = 0x0 }, { .mutex = vr_mutex + 2, .vr_page = 0x1 },
{ .mutex = vr_mutex + 3, .vr_page = 0x0 }, { .mutex = vr_mutex + 3, .vr_page = 0x1 },
{ .mutex = vr_mutex + 4, .vr_page = 0x0 }, { .mutex = vr_mutex + 4, .vr_page = 0x1 },
{ .mutex = vr_mutex + 5, .vr_page = 0x0 }, { .mutex = vr_mutex + 5, .vr_page = 0x1 },
{ .mutex = vr_mutex + 6, .vr_page = 0x0 }, { .mutex = vr_mutex + 6, .vr_page = 0x1 },
{ .mutex = vr_mutex + 7, .vr_page = 0x0 }, { .mutex = vr_mutex + 7, .vr_page = 0x1 },
{ .mutex = vr_mutex + 8, .vr_page = 0x0 }, { .mutex = vr_mutex + 8, .vr_page = 0x1 },
{ .mutex = vr_mutex + 9, .vr_page = 0x0 }, { .mutex = vr_mutex + 9, .vr_page = 0x1 },
{ .mutex = vr_mutex + 10, .vr_page = 0x0 }, { .mutex = vr_mutex + 10, .vr_page = 0x1 },
{ .mutex = vr_mutex + 11, .vr_page = 0x0 }, { .mutex = vr_mutex + 11, .vr_page = 0x1 },
{ .mutex = vr_mutex + 12, .vr_page = 0x0 }, { .mutex = vr_mutex + 12, .vr_page = 0x1 },
}
◆ vr_rail_table
| vr_mapping_sensor vr_rail_table[] |
◆ vr_status_table
| vr_mapping_status vr_status_table[] |
Initial value:
= {
}