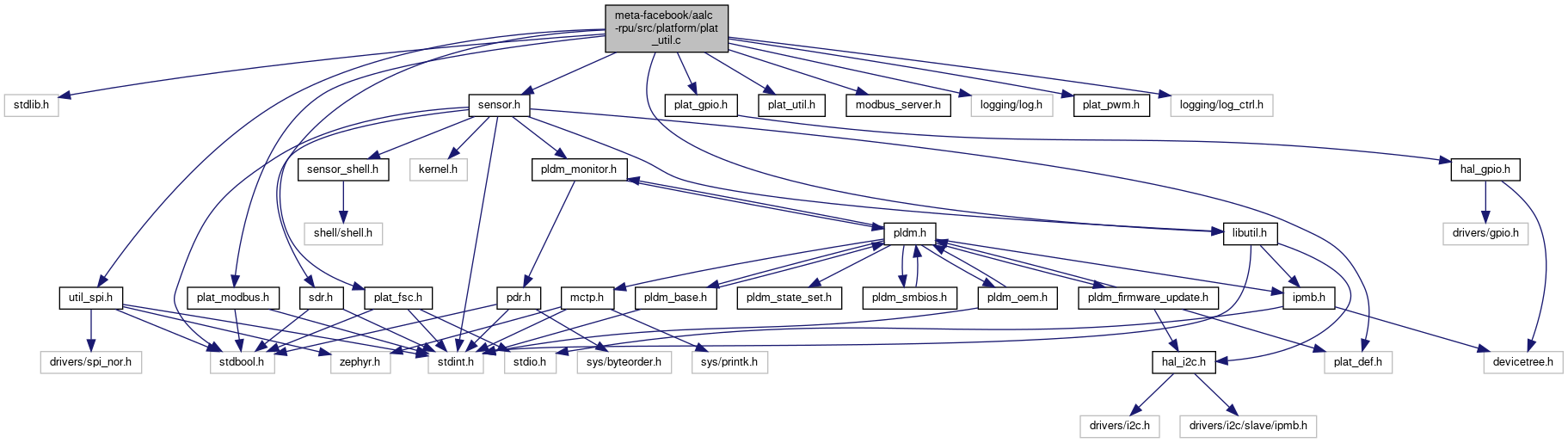
#include <stdlib.h>#include "plat_modbus.h"#include "plat_util.h"#include "modbus_server.h"#include <logging/log.h>#include "util_spi.h"#include "libutil.h"#include "sensor.h"#include "plat_gpio.h"#include "plat_pwm.h"#include "plat_fsc.h"#include "plat_hook.h"#include "plat_status.h"#include <shell/shell_uart.h>#include <logging/log_ctrl.h>
Include dependency graph for plat_util.c:
Macros | |
| #define | PLAT_UTIL_H |
| #define | I2C_MASTER_READ_BACK_MAX_SIZE 16 |
Functions | |
| LOG_MODULE_REGISTER (plat_util) | |
| bool | modbus_i2c_master_write_read (const uint16_t *modbus_data, uint8_t data_len) |
| void | modbus_i2c_master_write_read_response (uint16_t *modbus_data) |
| void | regs_reverse (uint16_t reg_len, uint16_t *data) |
| void | plat_enable_sensor_poll (void) |
| void | plat_disable_sensor_poll (void) |
| void | set_status_flag_config (uint8_t idx, uint32_t val) |
| void | get_status_flag_config (uint8_t *idx, uint32_t *val) |
| uint8_t | get_rpu_ready_pin_status () |
| float | pow_of_10 (int8_t exp) |
| bool | set_log_level (uint16_t data) |
| uint8_t | get_fsc_mode () |
| bool | get_abr (void) |
| void | set_abr (uint8_t onoff) |
| void | set_fmc_wdt (uint32_t val) |
Variables | |
| struct { | |
| uint8_t idx | |
| uint32_t val | |
| } | status_flag_config |
Macro Definition Documentation
◆ I2C_MASTER_READ_BACK_MAX_SIZE
| #define I2C_MASTER_READ_BACK_MAX_SIZE 16 |
◆ PLAT_UTIL_H
| #define PLAT_UTIL_H |
Function Documentation
◆ get_abr()
| bool get_abr | ( | void | ) |
◆ get_fsc_mode()
| uint8_t get_fsc_mode | ( | ) |
Here is the call graph for this function:

◆ get_rpu_ready_pin_status()
| uint8_t get_rpu_ready_pin_status | ( | ) |
Here is the call graph for this function:

◆ get_status_flag_config()
| void get_status_flag_config | ( | uint8_t * | idx, |
| uint32_t * | val | ||
| ) |
◆ LOG_MODULE_REGISTER()
| LOG_MODULE_REGISTER | ( | plat_util | ) |
◆ modbus_i2c_master_write_read()
| bool modbus_i2c_master_write_read | ( | const uint16_t * | modbus_data, |
| uint8_t | data_len | ||
| ) |
Here is the call graph for this function:

◆ modbus_i2c_master_write_read_response()
| void modbus_i2c_master_write_read_response | ( | uint16_t * | modbus_data | ) |
◆ plat_disable_sensor_poll()
| void plat_disable_sensor_poll | ( | void | ) |
Here is the call graph for this function:

◆ plat_enable_sensor_poll()
| void plat_enable_sensor_poll | ( | void | ) |
Here is the call graph for this function:

◆ pow_of_10()
| float pow_of_10 | ( | int8_t | exp | ) |
◆ regs_reverse()
| void regs_reverse | ( | uint16_t | reg_len, |
| uint16_t * | data | ||
| ) |
◆ set_abr()
| void set_abr | ( | uint8_t | onoff | ) |
◆ set_fmc_wdt()
| void set_fmc_wdt | ( | uint32_t | val | ) |
◆ set_log_level()
| bool set_log_level | ( | uint16_t | data | ) |
◆ set_status_flag_config()
| void set_status_flag_config | ( | uint8_t | idx, |
| uint32_t | val | ||
| ) |
Variable Documentation
◆ idx
| uint8_t idx |
◆
| struct { ... } status_flag_config |
◆ val
| uint32_t val |