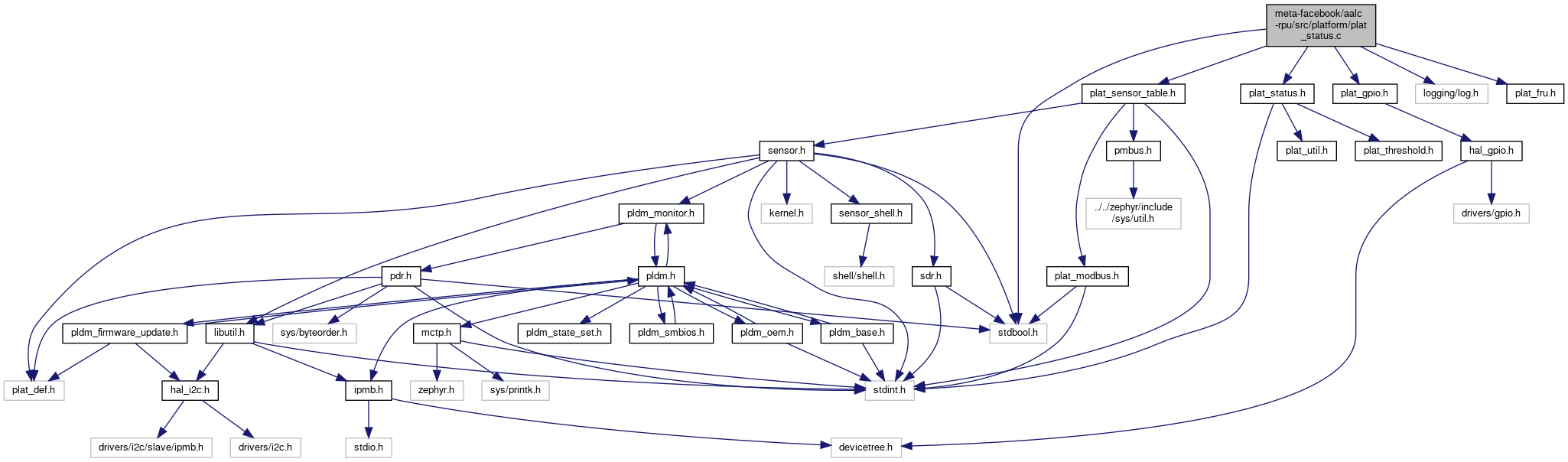
#include <stdbool.h>#include <logging/log.h>#include "plat_status.h"#include "plat_sensor_table.h"#include "plat_fru.h"#include "plat_gpio.h"
Include dependency graph for plat_status.c:
Macros | |
| #define | AALC_STICKY_STATUS_START 0x6000 |
| #define | STICKY_STATUS_SIZE 2 |
Functions | |
| LOG_MODULE_REGISTER (plat_status) | |
| uint32_t | get_status_flag (uint8_t idx) |
| void | set_status_flag (uint8_t idx, uint8_t bit, uint32_t val) |
| uint16_t | get_sticky_sensor_status (uint8_t idx) |
| bool | set_sticky_sensor_status (uint8_t idx, uint16_t val) |
| uint16_t | get_sensor_status_for_modbus_cmd (uint8_t status) |
Macro Definition Documentation
◆ AALC_STICKY_STATUS_START
| #define AALC_STICKY_STATUS_START 0x6000 |
◆ STICKY_STATUS_SIZE
| #define STICKY_STATUS_SIZE 2 |
Function Documentation
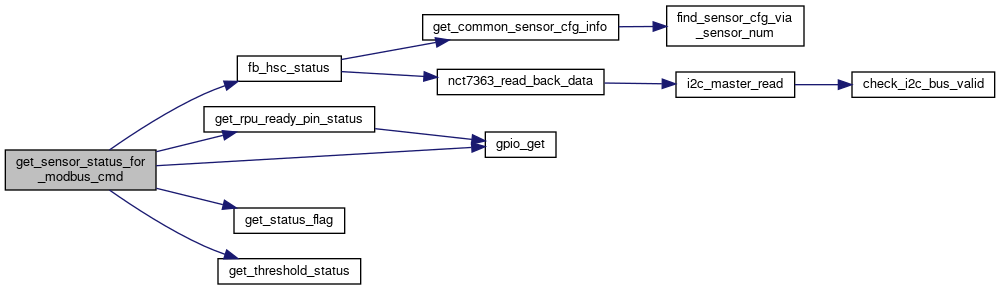
◆ get_sensor_status_for_modbus_cmd()
| uint16_t get_sensor_status_for_modbus_cmd | ( | uint8_t | status | ) |
Here is the call graph for this function:
◆ get_status_flag()
| uint32_t get_status_flag | ( | uint8_t | idx | ) |
◆ get_sticky_sensor_status()
| uint16_t get_sticky_sensor_status | ( | uint8_t | idx | ) |
Here is the call graph for this function:

◆ LOG_MODULE_REGISTER()
| LOG_MODULE_REGISTER | ( | plat_status | ) |
◆ set_status_flag()
| void set_status_flag | ( | uint8_t | idx, |
| uint8_t | bit, | ||
| uint32_t | val | ||
| ) |
◆ set_sticky_sensor_status()
| bool set_sticky_sensor_status | ( | uint8_t | idx, |
| uint16_t | val | ||
| ) |
Here is the call graph for this function:
