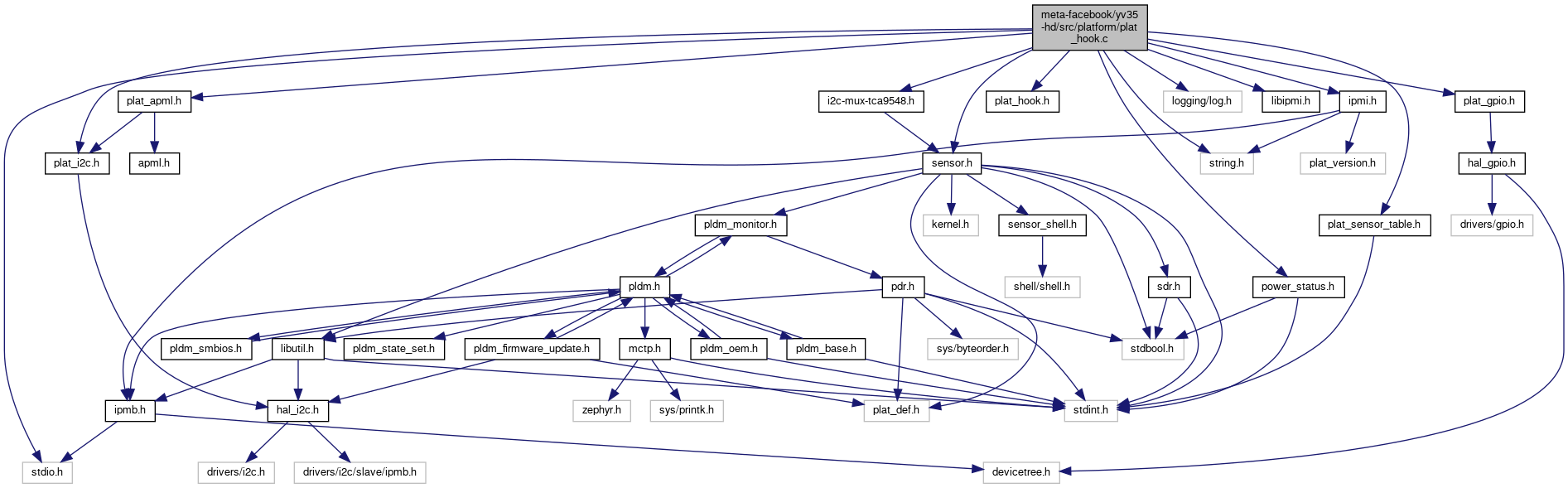
#include <stdio.h>#include <string.h>#include "sensor.h"#include "plat_i2c.h"#include "plat_gpio.h"#include "plat_hook.h"#include "plat_sensor_table.h"#include "i2c-mux-tca9548.h"#include "logging/log.h"#include "libipmi.h"#include "ipmi.h"#include "plat_apml.h"#include "power_status.h"
Include dependency graph for plat_hook.c:
Macros | |
| #define | ADJUST_ADM1278_CURRENT(x) (x * 0.94) |
| #define | ADJUST_ADM1278_POWER(x) (x * 0.95) |
| #define | ADJUST_LTC4282_CURRENT(x) ((x * 0.96) - 0.04) |
| #define | ADJUST_LTC4282_POWER(x) ((x * 0.96) - 0.6) |
| #define | ADJUST_MP5990_CURRENT(x) ((x * 1.0029) + 0.0542) |
| #define | ADJUST_MP5990_POWER(x) ((x * 1.0081) + 1.8285) |
| #define | DIMM_HIGH_TEMP_THRESHOLD 80 |
| #define | DRAM_THROTTLE_PERCENT 50 |
Variables | |
| adc_asd_init_arg | ast_adc_init_args [] |
| adm1278_init_arg | adm1278_init_args [] |
| ltc4282_init_arg | ltc4282_init_args [] = { [0] = { .r_sense_mohm = 0.5 } } |
| mp5990_init_arg | mp5990_init_args [] |
| nct7718w_init_arg | nct7718w_init_args [] |
| g788p81u_init_arg | g788p81u_init_args [] |
| struct tca9548 | mux_conf_addr_0xe2 [] |
| vr_pre_proc_arg | vr_pre_read_args [] |
| apml_mailbox_init_arg | apml_mailbox_init_args [] = { [0] = { .data = 0x00000000, .retry = 0 } } |
| ddr5_init_temp_arg | ddr5_init_temp_args [] |
| ddr5_init_power_arg | ddr5_init_power_args [] |
Macro Definition Documentation
◆ ADJUST_ADM1278_CURRENT
| #define ADJUST_ADM1278_CURRENT | ( | x | ) | (x * 0.94) |
◆ ADJUST_ADM1278_POWER
| #define ADJUST_ADM1278_POWER | ( | x | ) | (x * 0.95) |
◆ ADJUST_LTC4282_CURRENT
| #define ADJUST_LTC4282_CURRENT | ( | x | ) | ((x * 0.96) - 0.04) |
◆ ADJUST_LTC4282_POWER
| #define ADJUST_LTC4282_POWER | ( | x | ) | ((x * 0.96) - 0.6) |
◆ ADJUST_MP5990_CURRENT
| #define ADJUST_MP5990_CURRENT | ( | x | ) | ((x * 1.0029) + 0.0542) |
◆ ADJUST_MP5990_POWER
| #define ADJUST_MP5990_POWER | ( | x | ) | ((x * 1.0081) + 1.8285) |
◆ DIMM_HIGH_TEMP_THRESHOLD
| #define DIMM_HIGH_TEMP_THRESHOLD 80 |
◆ DRAM_THROTTLE_PERCENT
| #define DRAM_THROTTLE_PERCENT 50 |
Function Documentation
◆ apml_report_fail_cb()
| void apml_report_fail_cb | ( | const apml_msg * | msg | ) |
◆ apml_report_result_check()
| void apml_report_result_check | ( | const apml_msg * | msg | ) |
◆ check_dram_throttle()
| void check_dram_throttle | ( | uint8_t | sensor_num, |
| int *const | reading | ||
| ) |
Here is the call graph for this function:
◆ LOG_MODULE_REGISTER()
| LOG_MODULE_REGISTER | ( | plat_hook | ) |
◆ post_adm1278_cur_read()
| bool post_adm1278_cur_read | ( | sensor_cfg * | cfg, |
| void * | args, | ||
| int * | reading | ||
| ) |
Here is the call graph for this function:

◆ post_adm1278_pwr_read()
| bool post_adm1278_pwr_read | ( | sensor_cfg * | cfg, |
| void * | args, | ||
| int * | reading | ||
| ) |
Here is the call graph for this function:

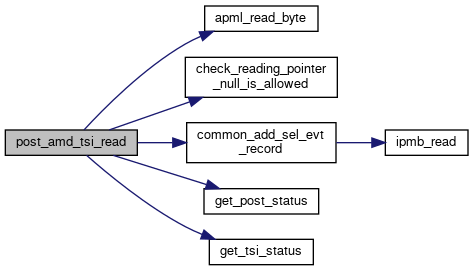
◆ post_amd_tsi_read()
| bool post_amd_tsi_read | ( | sensor_cfg * | cfg, |
| void * | args, | ||
| int *const | reading | ||
| ) |
Here is the call graph for this function:
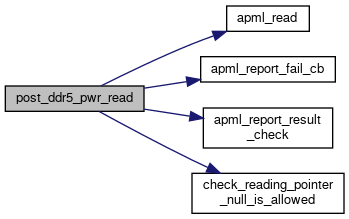
◆ post_ddr5_pwr_read()
| bool post_ddr5_pwr_read | ( | sensor_cfg * | cfg, |
| void * | args, | ||
| int * | reading | ||
| ) |
Here is the call graph for this function:
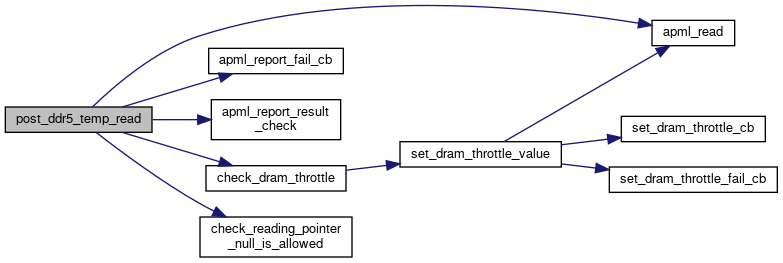
◆ post_ddr5_temp_read()
| bool post_ddr5_temp_read | ( | sensor_cfg * | cfg, |
| void * | args, | ||
| int *const | reading | ||
| ) |
Here is the call graph for this function:
◆ post_ltc4282_cur_read()
| bool post_ltc4282_cur_read | ( | sensor_cfg * | cfg, |
| void * | args, | ||
| int * | reading | ||
| ) |
Here is the call graph for this function:

◆ post_ltc4282_pwr_read()
| bool post_ltc4282_pwr_read | ( | sensor_cfg * | cfg, |
| void * | args, | ||
| int * | reading | ||
| ) |
Here is the call graph for this function:

◆ post_mp5990_cur_read()
| bool post_mp5990_cur_read | ( | sensor_cfg * | cfg, |
| void * | args, | ||
| int * | reading | ||
| ) |
Here is the call graph for this function:

◆ post_mp5990_pwr_read()
| bool post_mp5990_pwr_read | ( | sensor_cfg * | cfg, |
| void * | args, | ||
| int * | reading | ||
| ) |
Here is the call graph for this function:

◆ post_vol_bat3v_read()
| bool post_vol_bat3v_read | ( | sensor_cfg * | cfg, |
| void * | args, | ||
| int * | reading | ||
| ) |
Here is the call graph for this function:

◆ pre_nvme_read()
| bool pre_nvme_read | ( | sensor_cfg * | cfg, |
| void * | args | ||
| ) |
Here is the call graph for this function:

◆ pre_vol_bat3v_read()
| bool pre_vol_bat3v_read | ( | sensor_cfg * | cfg, |
| void * | args | ||
| ) |
Here is the call graph for this function:

◆ pre_vr_read()
| bool pre_vr_read | ( | sensor_cfg * | cfg, |
| void * | args | ||
| ) |
Here is the call graph for this function:

◆ set_dram_throttle_cb()
| void set_dram_throttle_cb | ( | const apml_msg * | msg | ) |
◆ set_dram_throttle_fail_cb()
| void set_dram_throttle_fail_cb | ( | const apml_msg * | msg | ) |
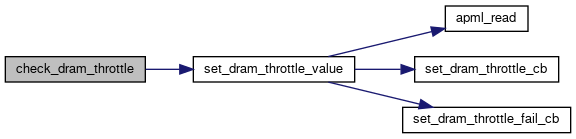
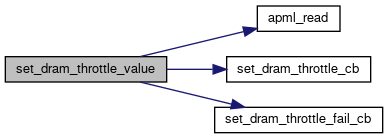
◆ set_dram_throttle_value()
| void set_dram_throttle_value | ( | uint8_t | throttle_percent | ) |
Here is the call graph for this function:
Variable Documentation
◆ adm1278_init_args
| adm1278_init_arg adm1278_init_args[] |
Initial value:
= {
[0] = { .is_init = false, .config = { 0x3F1C }, .r_sense = 0.3 }
}
◆ apml_mailbox_init_args
| apml_mailbox_init_arg apml_mailbox_init_args[] = { [0] = { .data = 0x00000000, .retry = 0 } } |
◆ ast_adc_init_args
| adc_asd_init_arg ast_adc_init_args[] |
Initial value:
= {
[0] = { .is_init = false,
.deglitch[0] = { .deglitch_en = true, .upper_bound = 0x333 },
.deglitch[1] = { .deglitch_en = true, .upper_bound = 0x303 },
.deglitch[2] = { .deglitch_en = true, .upper_bound = 0x2C7 },
.deglitch[3] = { .deglitch_en = true, .upper_bound = 0x1DC },
.deglitch[4] = { .deglitch_en = true, .upper_bound = 0x1E0 },
.deglitch[5] = { .deglitch_en = true, .upper_bound = 0x2C7 },
},
[1] = {
.is_init = false,
.deglitch[0] = { .deglitch_en = true, .upper_bound = 0x30B },
.deglitch[1] = { .deglitch_en = true, .upper_bound = 0x2EE },
.deglitch[2] = { .deglitch_en = true, .upper_bound = 0x209 },
.deglitch[4] = { .deglitch_en = true, .upper_bound = 0x333 },
.deglitch[5] = { .deglitch_en = true, .upper_bound = 0x333 },
.deglitch[6] = { .deglitch_en = true, .upper_bound = 0x25F },
}
}
◆ ddr5_init_power_args
| ddr5_init_power_arg ddr5_init_power_args[] |
Initial value:
= {
[0] = { .HID_code = 0x00, .port_number = 0 }, [1] = { .HID_code = 0x02, .port_number = 0 },
[2] = { .HID_code = 0x01, .port_number = 0 }, [3] = { .HID_code = 0x03, .port_number = 0 },
[4] = { .HID_code = 0x00, .port_number = 1 }, [5] = { .HID_code = 0x02, .port_number = 1 },
[6] = { .HID_code = 0x01, .port_number = 1 }, [7] = { .HID_code = 0x03, .port_number = 1 },
}
◆ ddr5_init_temp_args
| ddr5_init_temp_arg ddr5_init_temp_args[] |
Initial value:
= {
[0] = { .HID_code = 0x00, .port_number = 0 }, [1] = { .HID_code = 0x02, .port_number = 0 },
[2] = { .HID_code = 0x01, .port_number = 0 }, [3] = { .HID_code = 0x03, .port_number = 0 },
[4] = { .HID_code = 0x00, .port_number = 1 }, [5] = { .HID_code = 0x02, .port_number = 1 },
[6] = { .HID_code = 0x01, .port_number = 1 }, [7] = { .HID_code = 0x03, .port_number = 1 },
}
◆ g788p81u_init_args
| g788p81u_init_arg g788p81u_init_args[] |
Initial value:
= { [0] = { .is_init = false,
.remote_T_high_limit = 0x50,
.alert_mode = 0x01,
.alert_mask = 0x8B,
.configuration = 0x07,
.remote_temp_therm_limit = 0x64,
.local_temp_therm_limit = 0x64 } }
◆ ltc4282_init_args
| ltc4282_init_arg ltc4282_init_args[] = { [0] = { .r_sense_mohm = 0.5 } } |
◆ mp5990_init_args
| mp5990_init_arg mp5990_init_args[] |
Initial value:
= {
[0] = { .is_init = false,
.iout_cal_gain = 0x0140,
.iout_oc_fault_limit = 0x0032,
.ocw_sc_ref = 0x0FDA },
}
◆ mux_conf_addr_0xe2
| struct tca9548 mux_conf_addr_0xe2[] |
Initial value:
= {
[0] = { .addr = 0xe2, .chan = 0 }, [1] = { .addr = 0xe2, .chan = 1 },
[2] = { .addr = 0xe2, .chan = 2 }, [3] = { .addr = 0xe2, .chan = 3 },
[4] = { .addr = 0xe2, .chan = 4 }, [5] = { .addr = 0xe2, .chan = 5 },
[6] = { .addr = 0xe2, .chan = 6 }, [7] = { .addr = 0xe2, .chan = 7 },
}
◆ nct7718w_init_args
| nct7718w_init_arg nct7718w_init_args[] |
Initial value:
= {
[0] = { .is_init = false,
.rt1_high_alert_temp = 0x50,
.rt_filter_alert_mode = 0x01,
.alert_mask = 0x8B,
.configuration = 0x07,
.rt1_critical_temperature = 0x64,
.lt_critical_temperature = 0x64 },
}
◆ vr_pre_read_args
| vr_pre_proc_arg vr_pre_read_args[] |
Initial value:
= {
[0] = { 0x0 },
[1] = { 0x1 },
}