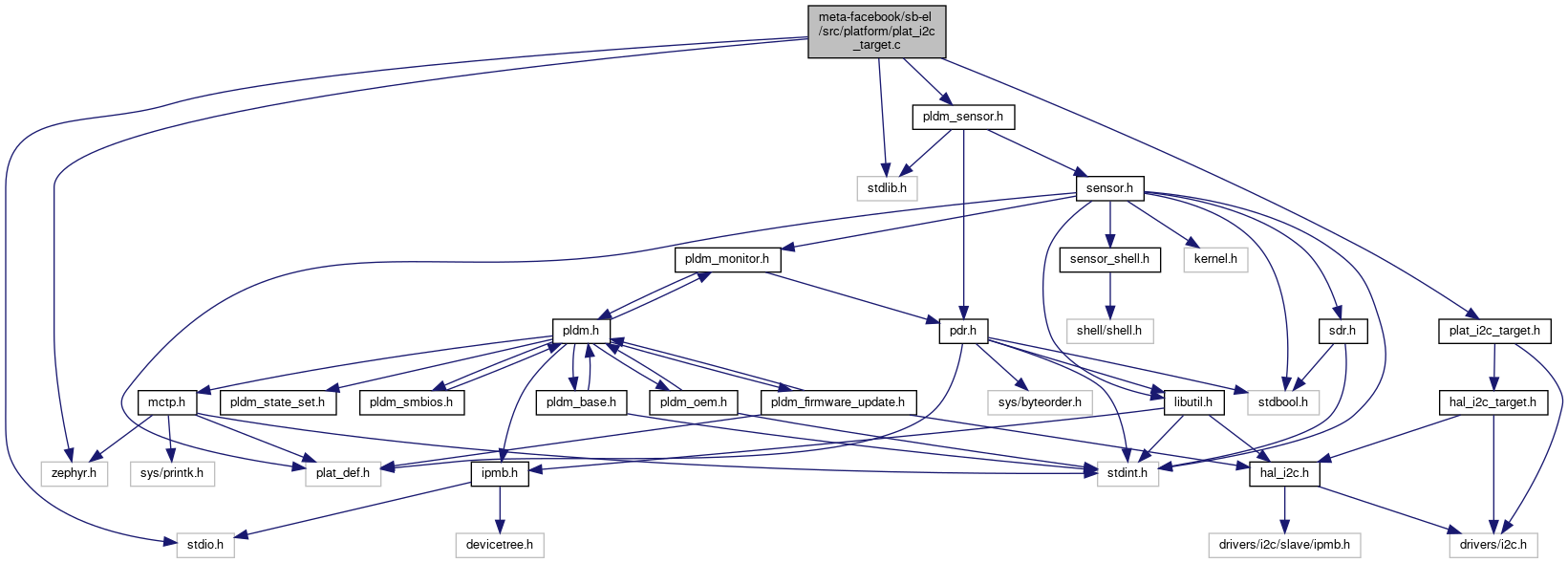
#include <zephyr.h>#include <stdio.h>#include <stdlib.h>#include <logging/log.h>#include "libutil.h"#include "pldm_sensor.h"#include "plat_version.h"#include "plat_i2c.h"#include "plat_class.h"#include "plat_cpld.h"#include "plat_hook.h"#include "plat_fru.h"#include "plat_pldm_sensor.h"#include "plat_i2c_target.h"#include "plat_power_capping.h"#include "plat_adc.h"
Include dependency graph for plat_i2c_target.c:
Macros | |
| #define | MAX_TARGET_TABLE_NUM 12 |
| #define | DATA_TABLE_LENGTH_1 1 |
| #define | DATA_TABLE_LENGTH_2 2 |
| #define | DATA_TABLE_LENGTH_4 4 |
| #define | DATA_TABLE_LENGTH_7 7 |
| #define | DATA_TABLE_LENGTH_13 13 |
| #define | DEVICE_TYPE 0x01 |
| #define | REGISTER_LAYOUT_VERSION 0x01 |
| #define | SENSOR_READING_PDR_INDEX_MAX 50 |
| #define | SENSOR_INIT_PDR_INDEX_MAX 248 |
| #define | PLAT_MASTER_WRITE_STACK_SIZE 1024 |
| #define | AEGIS_CARRIER_BOARD_ID 0x0000 |
| #define | CPLD_VERSION_GET_REG 0x32 |
| #define | CPLD_VERSION_GET_REG_LEN 4 |
| #define | STRAP_SET_TYPE 0x44 |
| #define | VR_PWR_BUF_SIZE 38 |
| #define | I2C_TARGET_BUS_ASIC I2C_BUS7 |
| #define | I2C_TARGET_BUS_ASIC_NUWA0 I2C_BUS4 |
| #define | I2C_TARGET_BUS_ASIC_NUWA1 I2C_BUS5 |
Variables | |
| plat_sensor_init_data * | sensor_init_data_table [DATA_TABLE_LENGTH_2] = { NULL } |
| plat_sensor_reading * | sensor_reading_table [DATA_TABLE_LENGTH_4] = { NULL } |
| plat_inventory_ids * | inventory_ids_table [DATA_TABLE_LENGTH_1] = { NULL } |
| plat_strap_capability * | strap_capability_table [DATA_TABLE_LENGTH_1] = { NULL } |
| plat_fru_data * | fru_board_data_table [DATA_TABLE_LENGTH_13] = { NULL } |
| plat_fru_data * | fru_product_data_table [DATA_TABLE_LENGTH_7] = { NULL } |
| plat_i2c_bridge_command_status * | i2c_bridge_command_status_table [DATA_TABLE_LENGTH_1] = { NULL } |
| plat_i2c_bridge_command_response_data * | i2c_bridge_command_response_data_table [DATA_TABLE_LENGTH_1] = { NULL } |
| struct k_thread | plat_master_write_thread |
| k_tid_t | plat_master_write_tid |
| telemetry_info | telemetry_info_table [] |
| voltage_rail_mapping_sensor | voltage_rail_mapping_table [] |
| uint8_t | vr_pwr_sensor_table [] |
| const bool | I2C_TARGET_ENABLE_TABLE [MAX_TARGET_NUM] |
| const struct _i2c_target_config | I2C_TARGET_CONFIG_TABLE [MAX_TARGET_NUM] |
Macro Definition Documentation
◆ AEGIS_CARRIER_BOARD_ID
| #define AEGIS_CARRIER_BOARD_ID 0x0000 |
◆ CPLD_VERSION_GET_REG
| #define CPLD_VERSION_GET_REG 0x32 |
◆ CPLD_VERSION_GET_REG_LEN
| #define CPLD_VERSION_GET_REG_LEN 4 |
◆ DATA_TABLE_LENGTH_1
| #define DATA_TABLE_LENGTH_1 1 |
◆ DATA_TABLE_LENGTH_13
| #define DATA_TABLE_LENGTH_13 13 |
◆ DATA_TABLE_LENGTH_2
| #define DATA_TABLE_LENGTH_2 2 |
◆ DATA_TABLE_LENGTH_4
| #define DATA_TABLE_LENGTH_4 4 |
◆ DATA_TABLE_LENGTH_7
| #define DATA_TABLE_LENGTH_7 7 |
◆ DEVICE_TYPE
| #define DEVICE_TYPE 0x01 |
◆ I2C_TARGET_BUS_ASIC
| #define I2C_TARGET_BUS_ASIC I2C_BUS7 |
◆ I2C_TARGET_BUS_ASIC_NUWA0
| #define I2C_TARGET_BUS_ASIC_NUWA0 I2C_BUS4 |
◆ I2C_TARGET_BUS_ASIC_NUWA1
| #define I2C_TARGET_BUS_ASIC_NUWA1 I2C_BUS5 |
◆ MAX_TARGET_TABLE_NUM
| #define MAX_TARGET_TABLE_NUM 12 |
◆ PLAT_MASTER_WRITE_STACK_SIZE
| #define PLAT_MASTER_WRITE_STACK_SIZE 1024 |
◆ REGISTER_LAYOUT_VERSION
| #define REGISTER_LAYOUT_VERSION 0x01 |
◆ SENSOR_INIT_PDR_INDEX_MAX
| #define SENSOR_INIT_PDR_INDEX_MAX 248 |
◆ SENSOR_READING_PDR_INDEX_MAX
| #define SENSOR_READING_PDR_INDEX_MAX 50 |
◆ STRAP_SET_TYPE
| #define STRAP_SET_TYPE 0x44 |
◆ VR_PWR_BUF_SIZE
| #define VR_PWR_BUF_SIZE 38 |
Function Documentation
◆ allocate_table()
| void * allocate_table | ( | void ** | buffer, |
| size_t | buffer_size | ||
| ) |
◆ get_cached_sensor_reading_by_sensor_number()
| int get_cached_sensor_reading_by_sensor_number | ( | uint8_t | sensor_number | ) |
◆ get_fru_info_element()
| bool get_fru_info_element | ( | telemetry_info * | telemetry_info, |
| char ** | fru_element, | ||
| uint8_t * | fru_element_size | ||
| ) |
Here is the call graph for this function:

◆ get_vr_rail_by_control_vol_reg()
| uint8_t get_vr_rail_by_control_vol_reg | ( | uint8_t | control_vol_reg | ) |
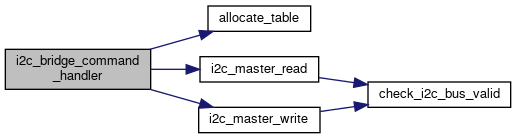
◆ i2c_bridge_command_handler()
| void i2c_bridge_command_handler | ( | struct k_work * | work_item | ) |
Here is the call graph for this function:
◆ initialize_fru_board_data()
| bool initialize_fru_board_data | ( | telemetry_info * | telemetry_info, |
| uint8_t * | buffer_size | ||
| ) |
Here is the call graph for this function:

◆ initialize_fru_product_data()
| bool initialize_fru_product_data | ( | telemetry_info * | telemetry_info, |
| uint8_t * | buffer_size | ||
| ) |
Here is the call graph for this function:

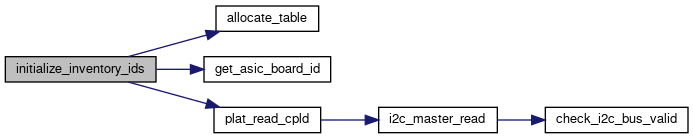
◆ initialize_inventory_ids()
| bool initialize_inventory_ids | ( | telemetry_info * | telemetry_info, |
| uint8_t * | buffer_size | ||
| ) |
Here is the call graph for this function:
◆ initialize_sensor_data()
| bool initialize_sensor_data | ( | telemetry_info * | telemetry_info, |
| uint8_t * | buffer_size | ||
| ) |
Here is the call graph for this function:

◆ initialize_sensor_reading()
| bool initialize_sensor_reading | ( | telemetry_info * | telemetry_info, |
| uint8_t * | buffer_size | ||
| ) |
Here is the call graph for this function:

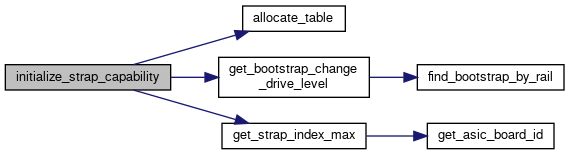
◆ initialize_strap_capability()
| bool initialize_strap_capability | ( | telemetry_info * | telemetry_info, |
| uint8_t * | buffer_size | ||
| ) |
Here is the call graph for this function:
◆ K_THREAD_STACK_DEFINE()
| K_THREAD_STACK_DEFINE | ( | plat_master_write_stack | , |
| PLAT_MASTER_WRITE_STACK_SIZE | |||
| ) |
◆ K_WORK_DEFINE()
| K_WORK_DEFINE | ( | set_bootstrap_element_work | , |
| set_bootstrap_element_handler | |||
| ) |
◆ LOG_MODULE_REGISTER()
| LOG_MODULE_REGISTER | ( | plat_i2c_target | ) |
◆ plat_master_write_thread_handler()
| void plat_master_write_thread_handler | ( | ) |
Here is the call graph for this function:

◆ plat_master_write_thread_init()
| void plat_master_write_thread_init | ( | ) |
Here is the call graph for this function:

◆ plat_pldm_sensor_poll_post()
| void plat_pldm_sensor_poll_post | ( | ) |
Here is the call graph for this function:

◆ plat_telemetry_table_init()
| void plat_telemetry_table_init | ( | void | ) |
Here is the call graph for this function:

◆ set_bootstrap_element()
| bool set_bootstrap_element | ( | uint8_t | bootstrap_pin, |
| uint8_t | user_setting_level | ||
| ) |
◆ set_bootstrap_element_handler()
| void set_bootstrap_element_handler | ( | ) |
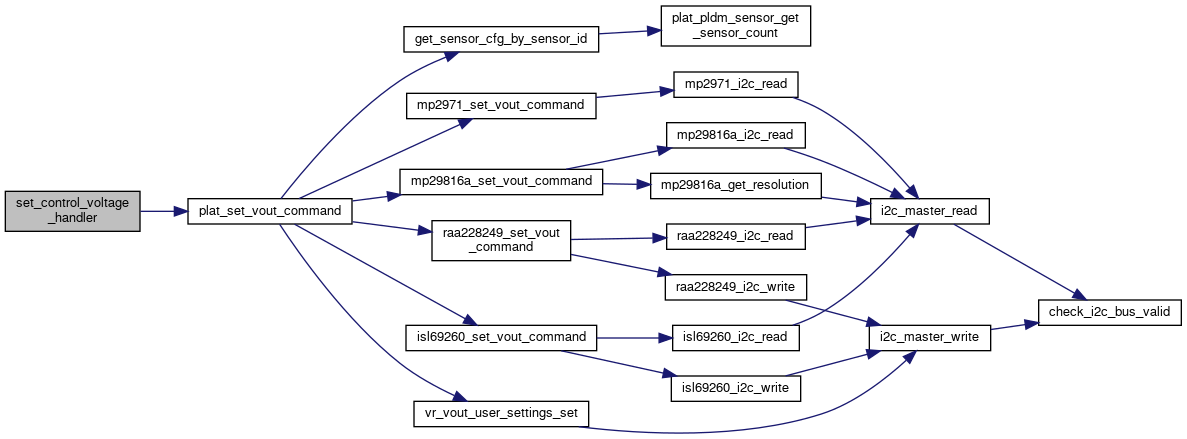
◆ set_control_voltage_handler()
| void set_control_voltage_handler | ( | struct k_work * | work_item | ) |
Here is the call graph for this function:
◆ set_power_capping_method_handler()
| void set_power_capping_method_handler | ( | struct k_work * | work_item | ) |
Here is the call graph for this function:

◆ set_power_capping_source_handler()
| void set_power_capping_source_handler | ( | struct k_work * | work_item | ) |
Here is the call graph for this function:

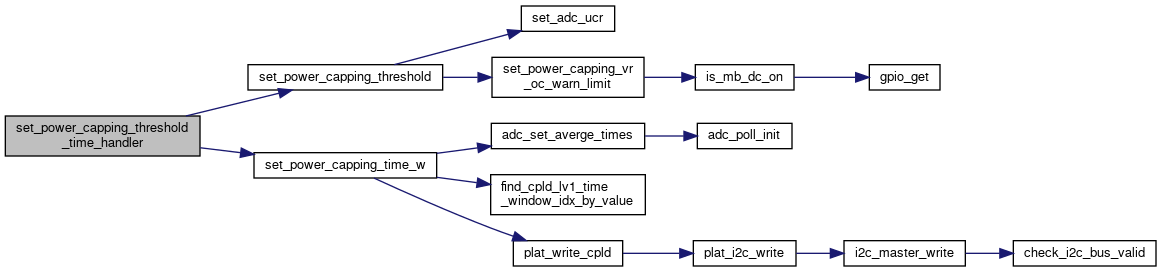
◆ set_power_capping_threshold_time_handler()
| void set_power_capping_threshold_time_handler | ( | struct k_work * | work_item | ) |
Here is the call graph for this function:
◆ set_sensor_polling_handler()
| void set_sensor_polling_handler | ( | struct k_work * | work_item | ) |
Here is the call graph for this function:

◆ update_sensor_reading_by_sensor_number()
| void update_sensor_reading_by_sensor_number | ( | uint8_t | sensor_number | ) |
Here is the call graph for this function:

◆ update_strap_capability_table()
| void update_strap_capability_table | ( | void | ) |
Here is the call graph for this function:

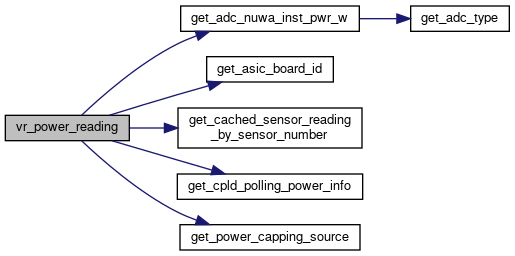
◆ vr_power_reading()
| void vr_power_reading | ( | uint8_t * | buffer, |
| size_t | buf_size | ||
| ) |
Here is the call graph for this function:
Variable Documentation
◆ fru_board_data_table
| plat_fru_data* fru_board_data_table[DATA_TABLE_LENGTH_13] = { NULL } |
◆ fru_product_data_table
| plat_fru_data* fru_product_data_table[DATA_TABLE_LENGTH_7] = { NULL } |
◆ i2c_bridge_command_response_data_table
| plat_i2c_bridge_command_response_data* i2c_bridge_command_response_data_table[DATA_TABLE_LENGTH_1] = { NULL } |
◆ i2c_bridge_command_status_table
| plat_i2c_bridge_command_status* i2c_bridge_command_status_table[DATA_TABLE_LENGTH_1] = { NULL } |
◆ I2C_TARGET_CONFIG_TABLE
| const struct _i2c_target_config I2C_TARGET_CONFIG_TABLE[MAX_TARGET_NUM] |
Initial value:
= {
{ 0xFF, 0xA },
{ 0xFF, 0xA },
{ 0xFF, 0xA },
{ 0x40, 0xA, command_reply_data_handle },
{ 0x40, 0xA, command_reply_data_handle },
{ 0x42, 0xA },
{ 0x40, 0xA, command_reply_data_handle },
{ 0xFF, 0xA },
{ 0xFF, 0xA },
{ 0xFF, 0xA },
{ 0xFF, 0xA },
{ 0xFF, 0xA },
}
◆ I2C_TARGET_ENABLE_TABLE
| const bool I2C_TARGET_ENABLE_TABLE[MAX_TARGET_NUM] |
Initial value:
= {
}
◆ inventory_ids_table
| plat_inventory_ids* inventory_ids_table[DATA_TABLE_LENGTH_1] = { NULL } |
◆ plat_master_write_thread
| struct k_thread plat_master_write_thread |
◆ plat_master_write_tid
| k_tid_t plat_master_write_tid |
◆ sensor_init_data_table
| plat_sensor_init_data* sensor_init_data_table[DATA_TABLE_LENGTH_2] = { NULL } |
◆ sensor_reading_table
| plat_sensor_reading* sensor_reading_table[DATA_TABLE_LENGTH_4] = { NULL } |
◆ strap_capability_table
| plat_strap_capability* strap_capability_table[DATA_TABLE_LENGTH_1] = { NULL } |
◆ telemetry_info_table
| telemetry_info telemetry_info_table[] |
◆ voltage_rail_mapping_table
| voltage_rail_mapping_sensor voltage_rail_mapping_table[] |
Initial value:
= {
}
#define CONTROL_VOL_VR_ASIC_P1V8_VPP_HBM1357_REG
Definition: plat_i2c_target.h:71
#define CONTROL_VOL_VR_ASIC_P0V75_NUWA0_VDD_REG
Definition: plat_i2c_target.h:72
#define CONTROL_VOL_VR_ASIC_P0V75_VDDPHY_HBM0246_REG
Definition: plat_i2c_target.h:64
#define CONTROL_VOL_VR_ASIC_P0V4_VDDQL_HBM0246_REG
Definition: plat_i2c_target.h:68
#define CONTROL_VOL_VR_ASIC_P1V8_VPP_HBM0246_REG
Definition: plat_i2c_target.h:70
#define CONTROL_VOL_VR_ASIC_P0V4_VDDQL_HBM1357_REG
Definition: plat_i2c_target.h:69
#define CONTROL_VOL_VR_ASIC_P1V05_VDDC_HBM1357_REG
Definition: plat_i2c_target.h:67
#define CONTROL_VOL_VR_ASIC_P0V75_VDDPHY_HBM1357_REG
Definition: plat_i2c_target.h:65
#define CONTROL_VOL_VR_ASIC_P1V05_VDDC_HBM0246_REG
Definition: plat_i2c_target.h:66
#define CONTROL_VOL_VR_ASIC_P0V75_NUWA1_VDD_REG
Definition: plat_i2c_target.h:73
◆ vr_pwr_sensor_table
| uint8_t vr_pwr_sensor_table[] |
Initial value:
= {
}
@ SENSOR_NUM_ASIC_P0V75_MAX_S_VDD_PWR_W
Definition: plat_pldm_sensor.h:204
@ SENSOR_NUM_ASIC_P0V75_OWL_E_VDD_PWR_W
Definition: plat_pldm_sensor.h:180
@ SENSOR_NUM_ASIC_P0V75_OWL_E_TRVDD_PWR_W
Definition: plat_pldm_sensor.h:176
@ SENSOR_NUM_ASIC_P1V05_VDDC_HBM1357_PWR_W
Definition: plat_pldm_sensor.h:248
@ SENSOR_NUM_ASIC_P0V85_HAMSA_VDD_PWR_W
Definition: plat_pldm_sensor.h:216
@ SENSOR_NUM_ASIC_P0V9_OWL_E_TRVDD_PWR_W
Definition: plat_pldm_sensor.h:172
@ SENSOR_NUM_ASIC_P0V75_MAX_N_VDD_PWR_W
Definition: plat_pldm_sensor.h:200
@ SENSOR_NUM_ASIC_P0V75_OWL_W_TRVDD_PWR_W
Definition: plat_pldm_sensor.h:188
@ SENSOR_NUM_ASIC_P0V75_VDDPHY_HBM0246_PWR_W
Definition: plat_pldm_sensor.h:220
@ SENSOR_NUM_ASIC_P0V75_VDDPHY_HBM1357_PWR_W
Definition: plat_pldm_sensor.h:240
@ SENSOR_NUM_ASIC_P0V4_VDDQL_HBM0246_PWR_W
Definition: plat_pldm_sensor.h:224
@ SENSOR_NUM_ASIC_P1V8_VPP_HBM0246_PWR_W
Definition: plat_pldm_sensor.h:236
@ SENSOR_NUM_ASIC_P1V2_HAMSA_VDDHRXTX_PCIE_PWR_W
Definition: plat_pldm_sensor.h:212
@ SENSOR_NUM_ASIC_P0V75_OWL_W_VDD_PWR_W
Definition: plat_pldm_sensor.h:192
@ SENSOR_NUM_ASIC_P0V75_NUWA1_VDD_PWR_W
Definition: plat_pldm_sensor.h:168
@ SENSOR_NUM_ASIC_P0V9_OWL_W_TRVDD_PWR_W
Definition: plat_pldm_sensor.h:184
@ SENSOR_NUM_ASIC_P1V8_VPP_HBM1357_PWR_W
Definition: plat_pldm_sensor.h:256
@ SENSOR_NUM_ASIC_P0V4_VDDQL_HBM1357_PWR_W
Definition: plat_pldm_sensor.h:244
@ SENSOR_NUM_ASIC_P0V75_NUWA0_VDD_PWR_W
Definition: plat_pldm_sensor.h:164
@ SENSOR_NUM_ASIC_P1V05_VDDC_HBM0246_PWR_W
Definition: plat_pldm_sensor.h:228
@ SENSOR_NUM_ASIC_P0V8_HAMSA_AVDD_PCIE_PWR_W
Definition: plat_pldm_sensor.h:208
@ SENSOR_NUM_ASIC_P0V75_MAX_M_VDD_PWR_W
Definition: plat_pldm_sensor.h:196