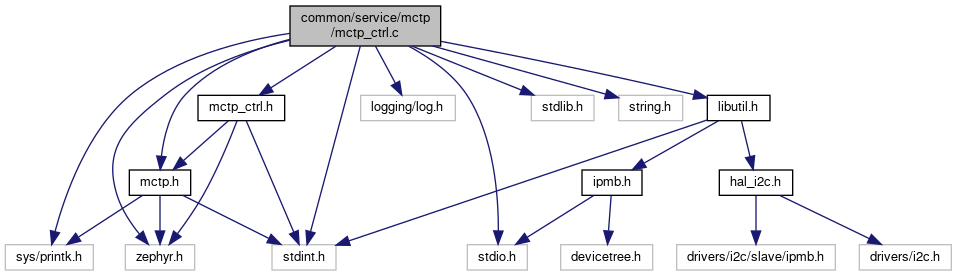
#include "mctp.h"#include "mctp_ctrl.h"#include <logging/log.h>#include <stdint.h>#include <stdio.h>#include <stdlib.h>#include <string.h>#include <sys/printk.h>#include <zephyr.h>#include "libutil.h"
Include dependency graph for mctp_ctrl.c:
Classes | |
| struct | _wait_msg |
Macros | |
| #define | DEFAULT_WAIT_TO_MS 3000 |
| #define | RESP_MSG_PROC_MUTEX_WAIT_TO_MS 1000 |
| #define | TO_CHK_INTERVAL_MS 1000 |
| #define | MCTP_CTRL_INST_ID_MASK 0x3F |
Typedefs | |
| typedef struct _wait_msg | wait_msg |
Functions | |
| LOG_MODULE_DECLARE (mctp) | |
| __weak int | load_mctp_support_types (uint8_t *type_len, uint8_t *types) |
| __weak void | plat_update_mctp_routing_table (uint8_t eid) |
| __weak void | plat_mctp_get_message_type_support_received () |
| uint8_t | mctp_ctrl_cmd_set_endpoint_id (void *mctp_inst, uint8_t *buf, uint16_t len, uint8_t *resp, uint16_t *resp_len, void *ext_params) |
| uint8_t | mctp_ctrl_cmd_get_endpoint_id (void *mctp_inst, uint8_t *buf, uint16_t len, uint8_t *resp, uint16_t *resp_len, void *ext_params) |
| uint8_t | mctp_ctrl_cmd_get_message_type_support (void *mctp_inst, uint8_t *buf, uint16_t len, uint8_t *resp, uint16_t *resp_len, void *ext_params) |
| uint8_t | mctp_ctrl_cmd_handler (void *mctp_p, uint8_t *buf, uint32_t len, mctp_ext_params ext_params) |
| void | mctp_ctrl_read_resp_handler (void *args, uint8_t *read_buf, uint16_t read_len) |
| void | mctp_ctrl_read_timeout_handler (void *args) |
| uint8_t | mctp_ctrl_send_msg (void *mctp_p, mctp_ctrl_msg *msg) |
| uint8_t | mctp_ctrl_read (void *mctp_p, mctp_ctrl_msg *msg, uint8_t *read_buf, uint16_t read_len) |
| K_THREAD_DEFINE (monitor_tid, 1024, mctp_ctrl_msg_timeout_monitor, NULL, NULL, NULL, K_PRIO_PREEMPT(1), 0, 0) | |
Macro Definition Documentation
◆ DEFAULT_WAIT_TO_MS
| #define DEFAULT_WAIT_TO_MS 3000 |
◆ MCTP_CTRL_INST_ID_MASK
| #define MCTP_CTRL_INST_ID_MASK 0x3F |
◆ RESP_MSG_PROC_MUTEX_WAIT_TO_MS
| #define RESP_MSG_PROC_MUTEX_WAIT_TO_MS 1000 |
◆ TO_CHK_INTERVAL_MS
| #define TO_CHK_INTERVAL_MS 1000 |
Typedef Documentation
◆ wait_msg
Function Documentation
◆ K_THREAD_DEFINE()
| K_THREAD_DEFINE | ( | monitor_tid | , |
| 1024 | , | ||
| mctp_ctrl_msg_timeout_monitor | , | ||
| NULL | , | ||
| NULL | , | ||
| NULL | , | ||
| K_PRIO_PREEMPT(1) | , | ||
| 0 | , | ||
| 0 | |||
| ) |
◆ load_mctp_support_types()
| __weak int load_mctp_support_types | ( | uint8_t * | type_len, |
| uint8_t * | types | ||
| ) |
◆ LOG_MODULE_DECLARE()
| LOG_MODULE_DECLARE | ( | mctp | ) |
◆ mctp_ctrl_cmd_get_endpoint_id()
| uint8_t mctp_ctrl_cmd_get_endpoint_id | ( | void * | mctp_inst, |
| uint8_t * | buf, | ||
| uint16_t | len, | ||
| uint8_t * | resp, | ||
| uint16_t * | resp_len, | ||
| void * | ext_params | ||
| ) |
Here is the call graph for this function:

◆ mctp_ctrl_cmd_get_message_type_support()
| uint8_t mctp_ctrl_cmd_get_message_type_support | ( | void * | mctp_inst, |
| uint8_t * | buf, | ||
| uint16_t | len, | ||
| uint8_t * | resp, | ||
| uint16_t * | resp_len, | ||
| void * | ext_params | ||
| ) |
Here is the call graph for this function:

◆ mctp_ctrl_cmd_handler()
| uint8_t mctp_ctrl_cmd_handler | ( | void * | mctp_p, |
| uint8_t * | buf, | ||
| uint32_t | len, | ||
| mctp_ext_params | ext_params | ||
| ) |
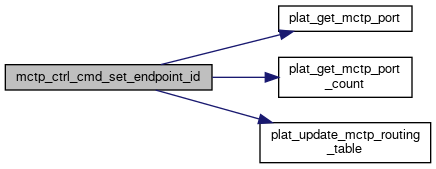
◆ mctp_ctrl_cmd_set_endpoint_id()
| uint8_t mctp_ctrl_cmd_set_endpoint_id | ( | void * | mctp_inst, |
| uint8_t * | buf, | ||
| uint16_t | len, | ||
| uint8_t * | resp, | ||
| uint16_t * | resp_len, | ||
| void * | ext_params | ||
| ) |
Here is the call graph for this function:
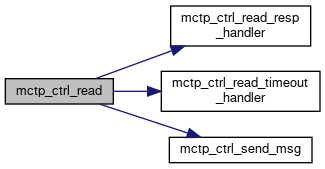
◆ mctp_ctrl_read()
| uint8_t mctp_ctrl_read | ( | void * | mctp_p, |
| mctp_ctrl_msg * | msg, | ||
| uint8_t * | read_buf, | ||
| uint16_t | read_len | ||
| ) |
Here is the call graph for this function:
◆ mctp_ctrl_read_resp_handler()
| void mctp_ctrl_read_resp_handler | ( | void * | args, |
| uint8_t * | read_buf, | ||
| uint16_t | read_len | ||
| ) |
◆ mctp_ctrl_read_timeout_handler()
| void mctp_ctrl_read_timeout_handler | ( | void * | args | ) |
◆ mctp_ctrl_send_msg()
| uint8_t mctp_ctrl_send_msg | ( | void * | mctp_p, |
| mctp_ctrl_msg * | msg | ||
| ) |
◆ plat_mctp_get_message_type_support_received()
| __weak void plat_mctp_get_message_type_support_received | ( | ) |
◆ plat_update_mctp_routing_table()
| __weak void plat_update_mctp_routing_table | ( | uint8_t | eid | ) |