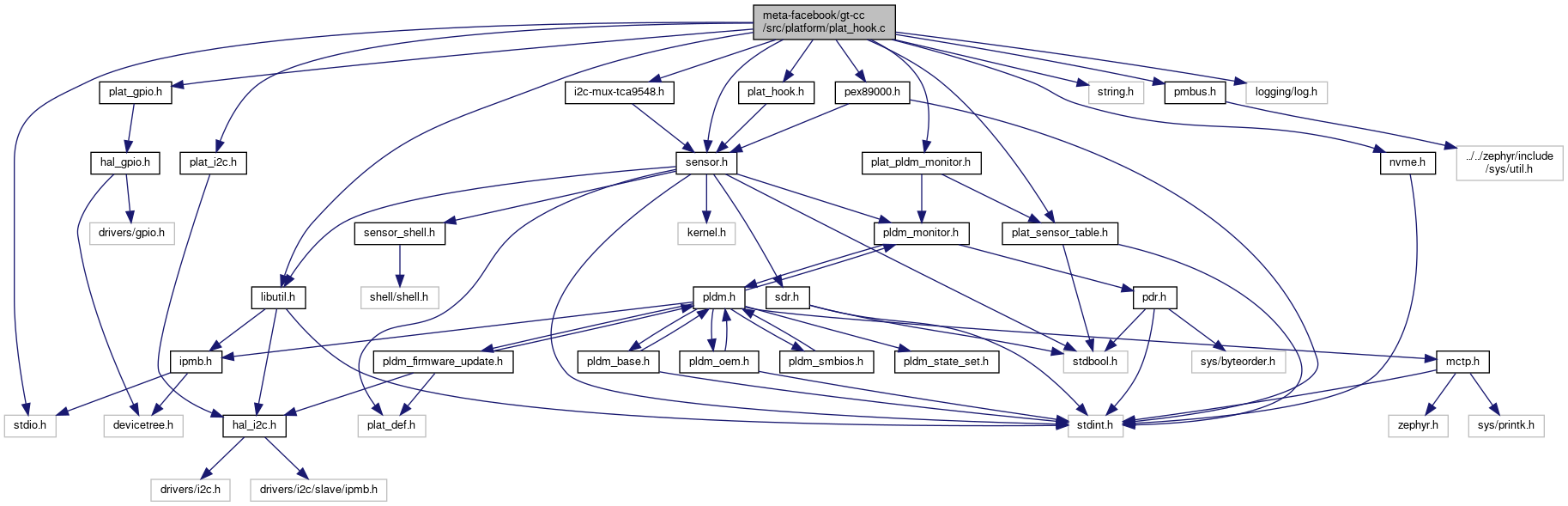
#include <stdio.h>#include <string.h>#include "libutil.h"#include "sensor.h"#include "plat_i2c.h"#include "plat_gpio.h"#include "plat_hook.h"#include "plat_sensor_table.h"#include "i2c-mux-tca9548.h"#include "pex89000.h"#include "pmbus.h"#include "nvme.h"#include "plat_pldm_monitor.h"#include "plat_mctp.h"#include "plat_fru.h"#include "plat_class.h"#include "tmp75.h"#include <logging/log.h>
Include dependency graph for plat_hook.c:
Macros | |
| #define | ADJUST_MP5990_POWER(x) ((x * 1.0004) + 6.5116) |
| #define | ADJUST_MP5990_CURRENT(x) ((x * 0.9993) + 0.6114) |
| #define | ADJUST_LTC4282_POWER(x) ((x * 0.9722) - 16.315) |
| #define | ADJUST_LTC4282_CURRENT(x) ((x * 0.9634) - 1.0236) |
| #define | ADJUST_LTC4286_POWER(x) ((x * 0.95) - 8.6) |
| #define | ADJUST_LTC4286_CURRENT(x) ((x * 0.95) - 0.7) |
Functions | |
| LOG_MODULE_REGISTER (plat_hook) | |
| K_MUTEX_DEFINE (i2c_bus6_mutex) | |
| K_MUTEX_DEFINE (i2c_bus9_mutex) | |
| K_MUTEX_DEFINE (i2c_bus10_mutex) | |
| bool | pre_vr_read (sensor_cfg *cfg, void *args) |
| bool | pre_pex89000_read (sensor_cfg *cfg, void *args) |
| bool | pre_i2c_bus_read (sensor_cfg *cfg, void *args) |
| bool | post_i2c_bus_read (sensor_cfg *cfg, void *args, int *reading) |
| bool | post_mp5990_read (sensor_cfg *cfg, void *args, int *reading) |
| bool | post_ltc4282_read (sensor_cfg *cfg, void *args, int *reading) |
| bool | post_ltc4286_read (sensor_cfg *cfg, void *args, int *reading) |
| struct k_mutex * | find_bus_mutex (sensor_cfg *cfg) |
| void | ssd_drive_reinit (void) |
| void | nic_drive_reinit_for_pollara (void) |
| void | nic_optics_drive_reinit_for_pollara (void) |
| bool | is_mb_dc_on () |
| void | set_cx7_init_arg_to_thor2 () |
Macro Definition Documentation
◆ ADJUST_LTC4282_CURRENT
| #define ADJUST_LTC4282_CURRENT | ( | x | ) | ((x * 0.9634) - 1.0236) |
◆ ADJUST_LTC4282_POWER
| #define ADJUST_LTC4282_POWER | ( | x | ) | ((x * 0.9722) - 16.315) |
◆ ADJUST_LTC4286_CURRENT
| #define ADJUST_LTC4286_CURRENT | ( | x | ) | ((x * 0.95) - 0.7) |
◆ ADJUST_LTC4286_POWER
| #define ADJUST_LTC4286_POWER | ( | x | ) | ((x * 0.95) - 8.6) |
◆ ADJUST_MP5990_CURRENT
| #define ADJUST_MP5990_CURRENT | ( | x | ) | ((x * 0.9993) + 0.6114) |
◆ ADJUST_MP5990_POWER
| #define ADJUST_MP5990_POWER | ( | x | ) | ((x * 1.0004) + 6.5116) |
Function Documentation
◆ find_bus_mutex()
| struct k_mutex * find_bus_mutex | ( | sensor_cfg * | cfg | ) |
◆ is_mb_dc_on()
| bool is_mb_dc_on | ( | ) |
Here is the call graph for this function:

◆ K_MUTEX_DEFINE() [1/3]
| K_MUTEX_DEFINE | ( | i2c_bus10_mutex | ) |
◆ K_MUTEX_DEFINE() [2/3]
| K_MUTEX_DEFINE | ( | i2c_bus6_mutex | ) |
◆ K_MUTEX_DEFINE() [3/3]
| K_MUTEX_DEFINE | ( | i2c_bus9_mutex | ) |
◆ LOG_MODULE_REGISTER()
| LOG_MODULE_REGISTER | ( | plat_hook | ) |
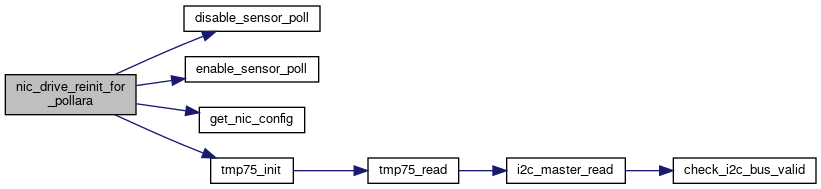
◆ nic_drive_reinit_for_pollara()
| void nic_drive_reinit_for_pollara | ( | void | ) |
Here is the call graph for this function:
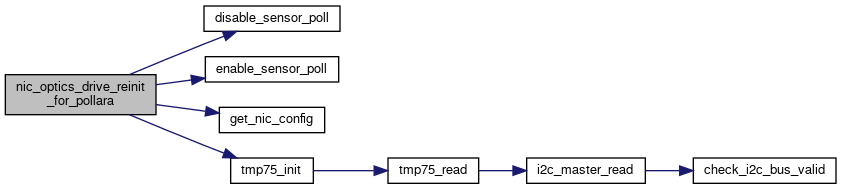
◆ nic_optics_drive_reinit_for_pollara()
| void nic_optics_drive_reinit_for_pollara | ( | void | ) |
Here is the call graph for this function:
◆ post_i2c_bus_read()
| bool post_i2c_bus_read | ( | sensor_cfg * | cfg, |
| void * | args, | ||
| int * | reading | ||
| ) |
Because BUS9 has two mux behind 16 E1.S with the same i2c address, so close all mux channels after the sensor read to avoid conflict with other devices reading.
Here is the call graph for this function:

◆ post_ltc4282_read()
| bool post_ltc4282_read | ( | sensor_cfg * | cfg, |
| void * | args, | ||
| int * | reading | ||
| ) |
Here is the call graph for this function:

◆ post_ltc4286_read()
| bool post_ltc4286_read | ( | sensor_cfg * | cfg, |
| void * | args, | ||
| int * | reading | ||
| ) |
Here is the call graph for this function:

◆ post_mp5990_read()
| bool post_mp5990_read | ( | sensor_cfg * | cfg, |
| void * | args, | ||
| int * | reading | ||
| ) |
Here is the call graph for this function:

◆ pre_i2c_bus_read()
| bool pre_i2c_bus_read | ( | sensor_cfg * | cfg, |
| void * | args | ||
| ) |
Here is the call graph for this function:

◆ pre_pex89000_read()
| bool pre_pex89000_read | ( | sensor_cfg * | cfg, |
| void * | args | ||
| ) |
Here is the call graph for this function:

◆ pre_vr_read()
| bool pre_vr_read | ( | sensor_cfg * | cfg, |
| void * | args | ||
| ) |
Here is the call graph for this function:

◆ set_cx7_init_arg_to_thor2()
| void set_cx7_init_arg_to_thor2 | ( | ) |
◆ ssd_drive_reinit()
| void ssd_drive_reinit | ( | void | ) |
Here is the call graph for this function:

Variable Documentation
◆ ast_adc_init_args
| adc_asd_init_arg ast_adc_init_args[] |
Initial value:
= {
[0] = { .is_init = false,
.deglitch[0] = { .deglitch_en = true, .upper_bound = 0x248 },
.deglitch[1] = { .deglitch_en = true, .upper_bound = 0x240 },
.deglitch[2] = { .deglitch_en = true, .upper_bound = 0x23E },
.deglitch[3] = { .deglitch_en = true, .upper_bound = 0x208 },
.deglitch[4] = { .deglitch_en = true, .upper_bound = 0x23E },
.deglitch[5] = { .deglitch_en = true, .upper_bound = 0x258 },
.deglitch[6] = { .deglitch_en = true, .upper_bound = 0x258 },
},
[1] = {
.is_init = false,
.deglitch[6] = { .deglitch_en = true, .upper_bound = 0x258 },
.deglitch[7] = { .deglitch_en = true, .upper_bound = 0x258 },
}
}
◆ cx7_init_args
| cx7_init_arg cx7_init_args[] |
◆ ina230_nic_sensor_init_args
| ina230_init_arg ina230_nic_sensor_init_args[] |
◆ ina230_pex_p1v25_sensor_init_args
| ina230_init_arg ina230_pex_p1v25_sensor_init_args[] |
◆ ina230_pex_p1v8_sensor_init_args
| ina230_init_arg ina230_pex_p1v8_sensor_init_args[] |
Initial value:
= {
[0] = {
.is_init = false,
.config = {
.MODE = 0b111,
.VSH_CT = 0b100,
.VBUS_CT = 0b100,
.AVG = 0b000,
},
.alt_cfg = {
.LEN = 1,
.BOL = 1,
},
.r_shunt = 0.002,
.alert_value = 2.0,
.i_max = 16.384
},
}
◆ ina230_ssd_sensor_init_args
| ina230_init_arg ina230_ssd_sensor_init_args[] |
◆ isl28022_nic_sensor_init_args
| isl28022_init_arg isl28022_nic_sensor_init_args[] |
◆ isl28022_pex_p1v25_sensor_init_args
| isl28022_init_arg isl28022_pex_p1v25_sensor_init_args[] |
◆ isl28022_pex_p1v8_sensor_init_args
| isl28022_init_arg isl28022_pex_p1v8_sensor_init_args[] |
Initial value:
= {
[0] = { .config.fields.MODE = 0b111,
.config.fields.SADC = 0b1111,
.config.fields.BADC = 0b1111,
.config.fields.PG = 0b00,
.config.fields.BRNG = 0b00,
.aux_control_config.do_config = true,
.aux_control_config.config.fields.INTREN = 1,
.bus_volt_threshold_config.do_config = true,
.bus_volt_threshold_config.max_threshold_limit = 2.048,
.r_shunt = 2,
.is_init = false },
}
◆ isl28022_ssd_sensor_init_args
| isl28022_init_arg isl28022_ssd_sensor_init_args[] |
◆ ltc4282_hsc_init_args
| ltc4282_init_arg ltc4282_hsc_init_args[] |
Initial value:
= {
[0] = { .is_init = false,
.r_sense_mohm = 0.142,
.is_register_setting_needed = 0x00,
},
}
◆ ltc4286_hsc_init_args
| ltc4286_init_arg ltc4286_hsc_init_args[] |
Initial value:
= {
[0] = { .is_init = false, .r_sense_mohm = 0.142, .mfr_config_1 = { 0xFFFF } },
}
◆ mp5990_hsc_init_args
| mp5990_init_arg mp5990_hsc_init_args[] |
Initial value:
= {
[0] = { .is_init = false,
.iout_cal_gain = 0xFFFF,
.iout_oc_fault_limit = 0xFFFF,
.ocw_sc_ref = 0xFFFF,
},
}
◆ mux_conf_addr_0xe0
| struct tca9548 mux_conf_addr_0xe0[] |
Initial value:
= {
[0] = { .addr = 0xe0, .chan = 0 }, [1] = { .addr = 0xe0, .chan = 1 },
[2] = { .addr = 0xe0, .chan = 2 }, [3] = { .addr = 0xe0, .chan = 3 },
[4] = { .addr = 0xe0, .chan = 4 }, [5] = { .addr = 0xe0, .chan = 5 },
[6] = { .addr = 0xe0, .chan = 6 }, [7] = { .addr = 0xe0, .chan = 7 },
}
◆ mux_conf_addr_0xe2
| struct tca9548 mux_conf_addr_0xe2[] |
Initial value:
= {
[0] = { .addr = 0xe2, .chan = 0 }, [1] = { .addr = 0xe2, .chan = 1 },
[2] = { .addr = 0xe2, .chan = 2 }, [3] = { .addr = 0xe2, .chan = 3 },
[4] = { .addr = 0xe2, .chan = 4 }, [5] = { .addr = 0xe2, .chan = 5 },
[6] = { .addr = 0xe2, .chan = 6 }, [7] = { .addr = 0xe2, .chan = 7 },
}
◆ nct7718w_init_args
| nct7718w_init_arg nct7718w_init_args[] |
Initial value:
= {
[0] = { .is_init = false,
.rt1_high_alert_temp = 0x46,
.rt_filter_alert_mode = 0x00,
.alert_mask = 0x07,
.configuration = 0x85,
.rt1_critical_temperature = 0x65,
.lt_critical_temperature = 0x65 },
}
◆ pex89000_pre_read_args
| pex89000_pre_proc_arg pex89000_pre_read_args[] |
Initial value:
= {
[0] = { .mux_info_p = &mux_conf_addr_0xe0[0] },
[1] = { .mux_info_p = &mux_conf_addr_0xe0[1] },
[2] = { .mux_info_p = &mux_conf_addr_0xe0[2] },
[3] = { .mux_info_p = &mux_conf_addr_0xe0[3] },
}
◆ pex_sensor_init_args
| pex89000_init_arg pex_sensor_init_args[] |
Initial value:
= {
[0] = { .idx = 0, .is_init = false },
[1] = { .idx = 1, .is_init = false },
[2] = { .idx = 2, .is_init = false },
[3] = { .idx = 3, .is_init = false },
}
◆ vr_pre_read_args
| vr_pre_proc_arg vr_pre_read_args[] |
Initial value:
= {
[0] = { .mux_info_p = &mux_conf_addr_0xe0[6], .vr_page = 0x0 },
[1] = { .mux_info_p = &mux_conf_addr_0xe0[6], .vr_page = 0x1 },
[2] = { .mux_info_p = &mux_conf_addr_0xe0[6], .vr_page = 0x0 },
[3] = { .mux_info_p = &mux_conf_addr_0xe0[6], .vr_page = 0x1 },
}