#include <stdlib.h>
#include "sensor.h"
#include "pdr.h"
Go to the source code of this file.
|
| void | pldm_sensor_monitor_init () |
| |
| void | pldm_sensor_poll_thread_init () |
| |
| void | pldm_sensor_polling_handler (void *arug0, void *arug1, void *arug2) |
| |
| void | pldm_sensor_get_reading (sensor_cfg *pldm_sensor_cfg, uint32_t *update_time, uint32_t *update_time_ms, int pldm_sensor_count, int thread_id, int sensor_num) |
| |
| uint8_t | pldm_sensor_get_reading_from_cache (uint16_t sensor_id, int *reading, uint8_t *sensor_operational_state) |
| |
| bool | pldm_sensor_is_interval_ready (pldm_sensor_info *pldm_sensor_list, uint8_t polling_time_config) |
| |
| int | pldm_sensor_get_info_via_sensor_thread_and_sensor_pdr_index (int thread_id, int sensor_pdr_index, uint16_t *sensor_id, real32_t *resolution, real32_t *offset, int8_t *unit_modifier, real32_t *poll_time, uint32_t *update_time, uint32_t *update_time_ms, uint8_t *type, int *cache, uint8_t *cache_status, char *check_access) |
| |
| pldm_sensor_thread * | plat_pldm_sensor_load_thread () |
| |
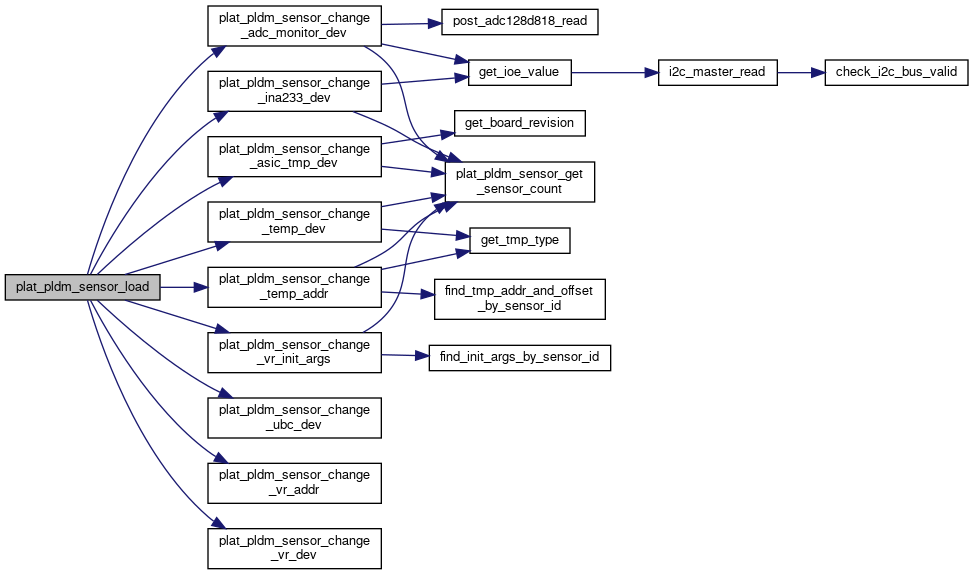
| pldm_sensor_info * | plat_pldm_sensor_load (int thread_id) |
| |
| int | plat_pldm_sensor_get_sensor_count (int thread_id) |
| |
| int | pldm_sensor_polling_pre_check (pldm_sensor_info *pldm_snr_list, int sensor_num) |
| |
| int | pldm_polling_sensor_reading (pldm_sensor_info *pldm_snr_list, int pldm_sensor_count, int thread_id, int sensor_num) |
| |
| int | pldm_polling_sensor_reading_optional_check (pldm_sensor_info *pldm_snr_list, int pldm_sensor_count, int thread_id, int sensor_num, bool interval_ready_check_en, bool polling_using_ms) |
| |
| pldm_sensor_thread * | pldm_sensor_get_thread_info (int thread_id) |
| |
| int | pldm_sensor_get_info_via_sensor_id (uint16_t sensor_id, float *resolution, float *offset, int8_t *unit_modifier, int *cache, uint8_t *sensor_operational_state) |
| |
◆ PLDM_SENSOR_POLL_STACK_SIZE
| #define PLDM_SENSOR_POLL_STACK_SIZE 3056 |
◆ PLDM_SENSOR_POLL_TIME_DEFAULT_MS
| #define PLDM_SENSOR_POLL_TIME_DEFAULT_MS 1000 |
◆ pldm_sensor_info
◆ pldm_sensor_thread
◆ anonymous enum
| Enumerator |
|---|
| UP_THRESHOLD_WARN | |
| UP_THRESHOLD_CRIT | |
| UP_THRESHOLD_FATAL | |
| LOW_THRESHOLD_WARN | |
| LOW_THRESHOLD_CRIT | |
| LOW_THRESHOLD_FATAL | |
◆ plat_pldm_sensor_get_sensor_count()
| int plat_pldm_sensor_get_sensor_count |
( |
int |
thread_id | ) |
|
◆ plat_pldm_sensor_load()
◆ plat_pldm_sensor_load_thread()
◆ pldm_polling_sensor_reading()
| int pldm_polling_sensor_reading |
( |
pldm_sensor_info * |
pldm_snr_list, |
|
|
int |
pldm_sensor_count, |
|
|
int |
thread_id, |
|
|
int |
sensor_num |
|
) |
| |
◆ pldm_polling_sensor_reading_optional_check()
| int pldm_polling_sensor_reading_optional_check |
( |
pldm_sensor_info * |
pldm_snr_list, |
|
|
int |
pldm_sensor_count, |
|
|
int |
thread_id, |
|
|
int |
sensor_num, |
|
|
bool |
interval_ready_check_en, |
|
|
bool |
polling_using_ms |
|
) |
| |
◆ pldm_sensor_get_info_via_sensor_id()
| int pldm_sensor_get_info_via_sensor_id |
( |
uint16_t |
sensor_id, |
|
|
float * |
resolution, |
|
|
float * |
offset, |
|
|
int8_t * |
unit_modifier, |
|
|
int * |
cache, |
|
|
uint8_t * |
sensor_operational_state |
|
) |
| |
◆ pldm_sensor_get_info_via_sensor_thread_and_sensor_pdr_index()
| int pldm_sensor_get_info_via_sensor_thread_and_sensor_pdr_index |
( |
int |
thread_id, |
|
|
int |
sensor_pdr_index, |
|
|
uint16_t * |
sensor_id, |
|
|
real32_t * |
resolution, |
|
|
real32_t * |
offset, |
|
|
int8_t * |
unit_modifier, |
|
|
real32_t * |
poll_time, |
|
|
uint32_t * |
update_time, |
|
|
uint32_t * |
update_time_ms, |
|
|
uint8_t * |
type, |
|
|
int * |
cache, |
|
|
uint8_t * |
cache_status, |
|
|
char * |
check_access |
|
) |
| |
◆ pldm_sensor_get_reading()
| void pldm_sensor_get_reading |
( |
sensor_cfg * |
pldm_sensor_cfg, |
|
|
uint32_t * |
update_time, |
|
|
uint32_t * |
update_time_ms, |
|
|
int |
pldm_sensor_count, |
|
|
int |
thread_id, |
|
|
int |
sensor_num |
|
) |
| |
◆ pldm_sensor_get_reading_from_cache()
| uint8_t pldm_sensor_get_reading_from_cache |
( |
uint16_t |
sensor_id, |
|
|
int * |
reading, |
|
|
uint8_t * |
sensor_operational_state |
|
) |
| |
◆ pldm_sensor_get_thread_info()
◆ pldm_sensor_is_interval_ready()
| bool pldm_sensor_is_interval_ready |
( |
pldm_sensor_info * |
pldm_sensor_list, |
|
|
uint8_t |
polling_time_config |
|
) |
| |
◆ pldm_sensor_monitor_init()
| void pldm_sensor_monitor_init |
( |
| ) |
|
◆ pldm_sensor_poll_thread_init()
| void pldm_sensor_poll_thread_init |
( |
| ) |
|
◆ pldm_sensor_polling_handler()
| void pldm_sensor_polling_handler |
( |
void * |
arug0, |
|
|
void * |
arug1, |
|
|
void * |
arug2 |
|
) |
| |
◆ pldm_sensor_polling_pre_check()
| int pldm_sensor_polling_pre_check |
( |
pldm_sensor_info * |
pldm_snr_list, |
|
|
int |
sensor_num |
|
) |
| |