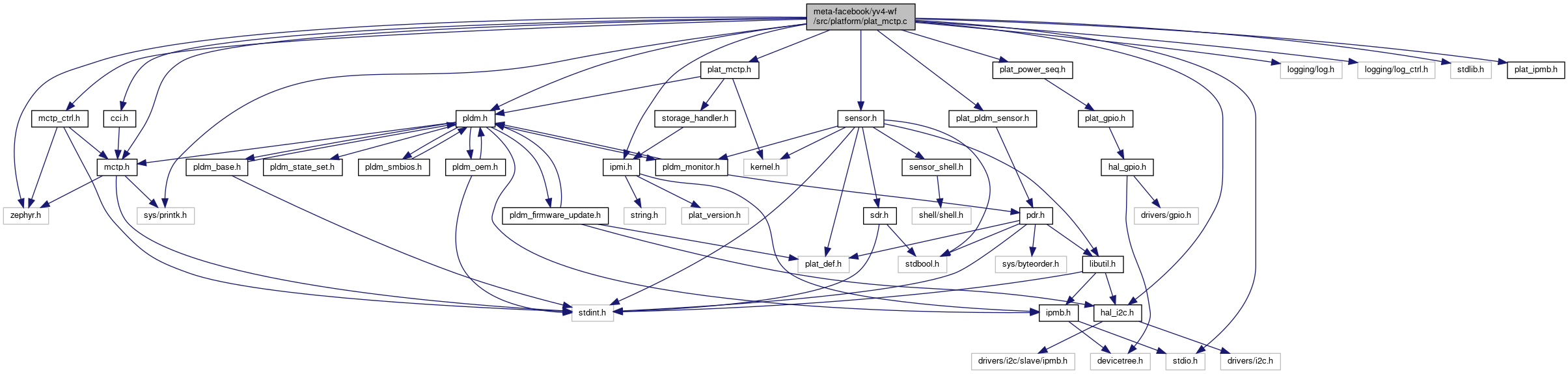
#include "plat_mctp.h"#include <zephyr.h>#include <sys/printk.h>#include <logging/log.h>#include <logging/log_ctrl.h>#include <stdlib.h>#include <stdio.h>#include "mctp.h"#include "mctp_ctrl.h"#include "pldm.h"#include "ipmi.h"#include "sensor.h"#include "cci.h"#include "plat_ipmb.h"#include "plat_power_seq.h"#include "plat_pldm_sensor.h"#include "plat_dimm.h"#include "hal_i2c.h"
Include dependency graph for plat_mctp.c:
Functions | |
| LOG_MODULE_REGISTER (plat_mctp) | |
| K_THREAD_STACK_DEFINE (set_dev_endpoint_stack, SET_DEV_ENDPOINT_STACK_SIZE) | |
| mctp * | find_mctp_by_bus (uint8_t bus) |
| bool | check_cxl_eid (uint8_t cxl_id) |
| bool | set_cxl_eid (uint8_t cxl_id) |
| bool | plat_is_cxl_set_eid_in_progress (uint8_t cxl_id) |
| uint8_t | get_mctp_info (uint8_t dest_endpoint, mctp **mctp_inst, mctp_ext_params *ext_params) |
| void | set_dev_endpoint_thread (void *arg1, void *arg2, void *arg3) |
| void | create_set_dev_endpoint_thread () |
| int | pal_get_medium_type (uint8_t interface) |
| mctp * | pal_get_mctp (uint8_t mctp_medium_type, uint8_t bus) |
| void | plat_mctp_init (void) |
| uint8_t | plat_get_mctp_port_count () |
| mctp_port * | plat_get_mctp_port (uint8_t index) |
| void | plat_update_mctp_routing_table (uint8_t eid) |
| int | load_mctp_support_types (uint8_t *type_len, uint8_t *types) |
| uint8_t | plat_get_eid () |
| uint8_t | plat_get_cxl_eid (uint8_t cxl_id) |
| int | pal_get_cci_timeout_ms () |
| bool | pal_is_need_mctp_interval (mctp *mctp_inst) |
| int | pal_get_mctp_interval_ms (mctp *mctp_inst) |
Variables | |
| uint8_t | plat_eid = MCTP_DEFAULT_ENDPOINT |
| struct k_thread | set_dev_endpoint_thread_data |
| mctp_route_entry | plat_mctp_route_tbl [] |
| uint8_t | MCTP_SUPPORTED_MESSAGES_TYPES [] |
Function Documentation
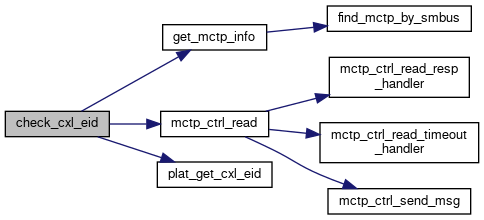
◆ check_cxl_eid()
| bool check_cxl_eid | ( | uint8_t | cxl_id | ) |
Here is the call graph for this function:
◆ create_set_dev_endpoint_thread()
| void create_set_dev_endpoint_thread | ( | ) |
◆ find_mctp_by_bus()
| mctp * find_mctp_by_bus | ( | uint8_t | bus | ) |
◆ get_mctp_info()
| uint8_t get_mctp_info | ( | uint8_t | dest_endpoint, |
| mctp ** | mctp_inst, | ||
| mctp_ext_params * | ext_params | ||
| ) |
Here is the call graph for this function:

◆ K_THREAD_STACK_DEFINE()
| K_THREAD_STACK_DEFINE | ( | set_dev_endpoint_stack | , |
| SET_DEV_ENDPOINT_STACK_SIZE | |||
| ) |
◆ load_mctp_support_types()
| int load_mctp_support_types | ( | uint8_t * | type_len, |
| uint8_t * | types | ||
| ) |
◆ LOG_MODULE_REGISTER()
| LOG_MODULE_REGISTER | ( | plat_mctp | ) |
◆ pal_get_cci_timeout_ms()
| int pal_get_cci_timeout_ms | ( | ) |
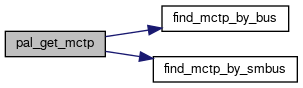
◆ pal_get_mctp()
| mctp * pal_get_mctp | ( | uint8_t | mctp_medium_type, |
| uint8_t | bus | ||
| ) |
Here is the call graph for this function:
◆ pal_get_mctp_interval_ms()
| int pal_get_mctp_interval_ms | ( | mctp * | mctp_inst | ) |
◆ pal_get_medium_type()
| int pal_get_medium_type | ( | uint8_t | interface | ) |
◆ pal_is_need_mctp_interval()
| bool pal_is_need_mctp_interval | ( | mctp * | mctp_inst | ) |
◆ plat_get_cxl_eid()
| uint8_t plat_get_cxl_eid | ( | uint8_t | cxl_id | ) |
◆ plat_get_eid()
| uint8_t plat_get_eid | ( | ) |
◆ plat_get_mctp_port()
| mctp_port * plat_get_mctp_port | ( | uint8_t | index | ) |
◆ plat_get_mctp_port_count()
| uint8_t plat_get_mctp_port_count | ( | ) |
◆ plat_is_cxl_set_eid_in_progress()
| bool plat_is_cxl_set_eid_in_progress | ( | uint8_t | cxl_id | ) |
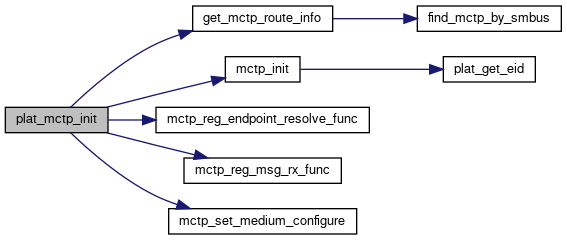
◆ plat_mctp_init()
| void plat_mctp_init | ( | void | ) |
BIC will not initialize mctp instance if CXL is not present
init mctp for bmc bus
Here is the call graph for this function:
◆ plat_update_mctp_routing_table()
| void plat_update_mctp_routing_table | ( | uint8_t | eid | ) |
Here is the call graph for this function:

◆ set_cxl_eid()
| bool set_cxl_eid | ( | uint8_t | cxl_id | ) |
Here is the call graph for this function:

◆ set_dev_endpoint_thread()
| void set_dev_endpoint_thread | ( | void * | arg1, |
| void * | arg2, | ||
| void * | arg3 | ||
| ) |
Variable Documentation
◆ MCTP_SUPPORTED_MESSAGES_TYPES
| uint8_t MCTP_SUPPORTED_MESSAGES_TYPES[] |
Initial value:
= {
}
◆ plat_eid
| uint8_t plat_eid = MCTP_DEFAULT_ENDPOINT |
◆ plat_mctp_route_tbl
| mctp_route_entry plat_mctp_route_tbl[] |
Initial value:
= {
}
◆ set_dev_endpoint_thread_data
| struct k_thread set_dev_endpoint_thread_data |